Engineer and developer who solves problems with hardware, software, and automation. Building performant, modular, and reliable systems-from embedded devices and robotics to virtualization and infrastructure automation.
Software and Embedded Systems Development
▸ ProtoTracer: Embedded 3D Rendering Engine
| Website | GitHub | Contributors on GitHub | 2020 - Now |










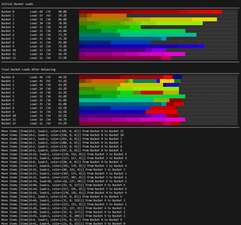
ProtoTracer is a C++ based 3D rendering engine optimized for microcontrollers. It calculates dynamic 3D scenes in real-time, reacting to sensor or user inputs to adapt the output. This software is designed to be modular for use in other projects. This includes features such as:
Doxygen genereated documentation from sourcecode: |
|||
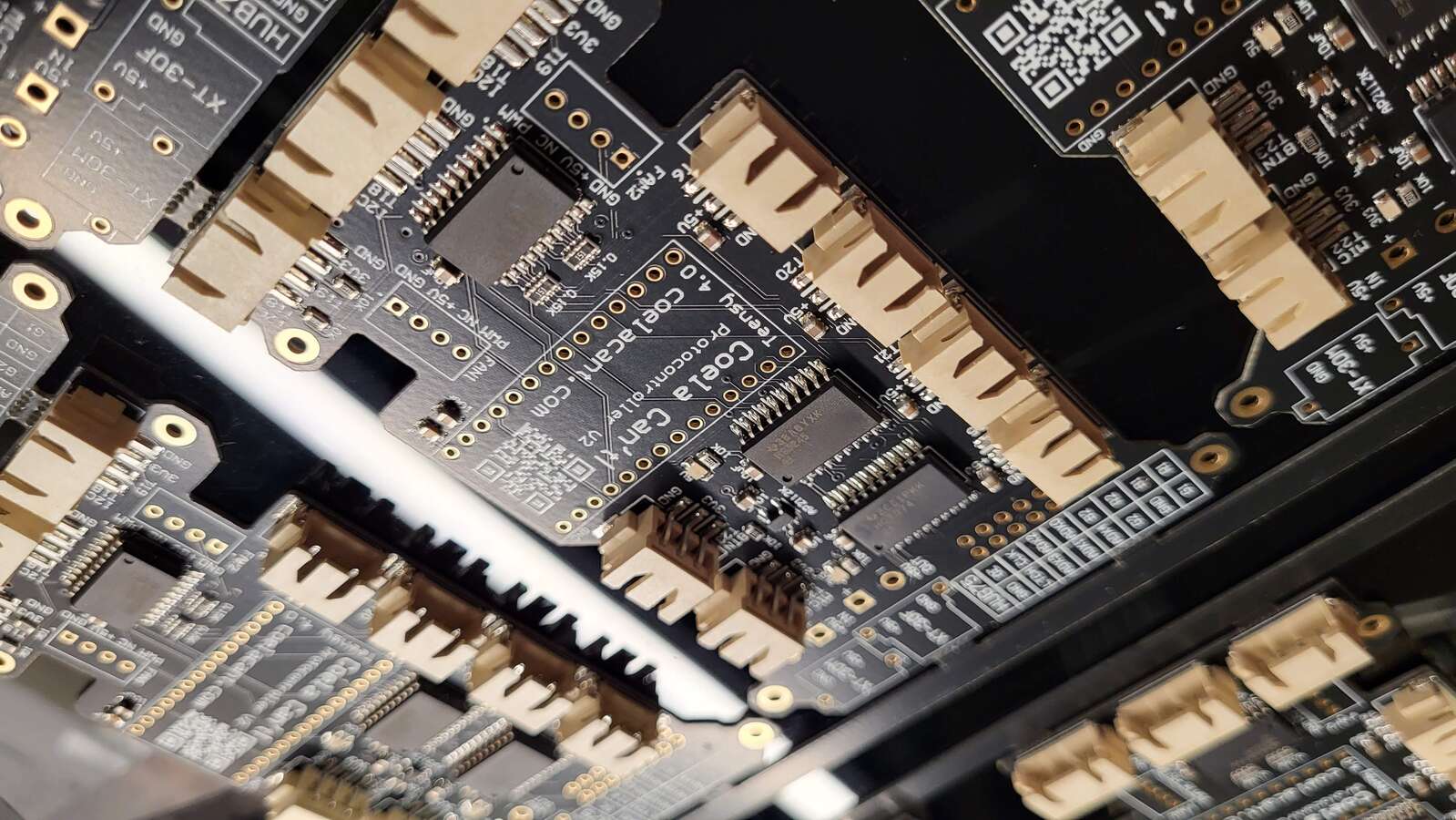
▸ AetherControl: Optimized CNC Firmware
| GitHub | Solo Project | 2023 - Now |
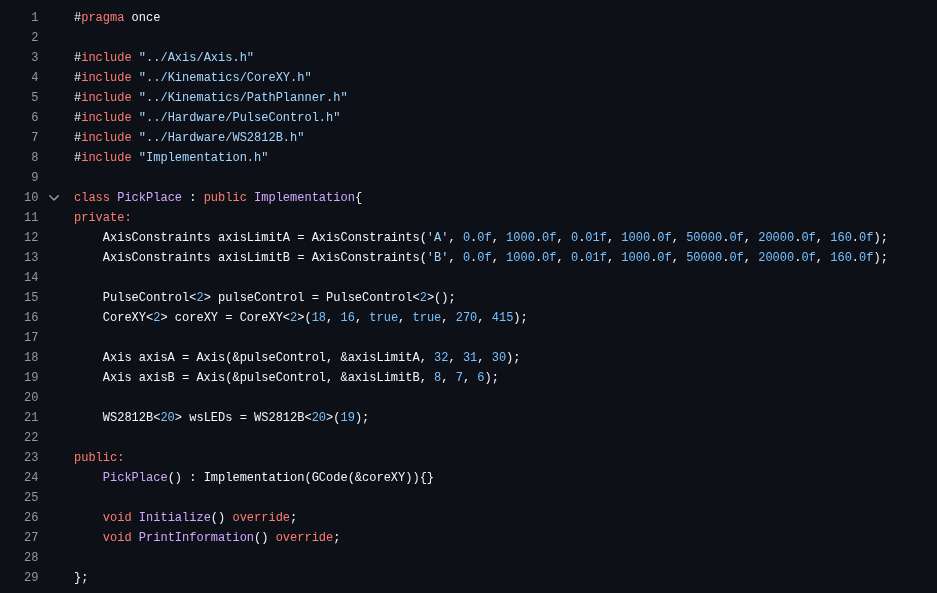
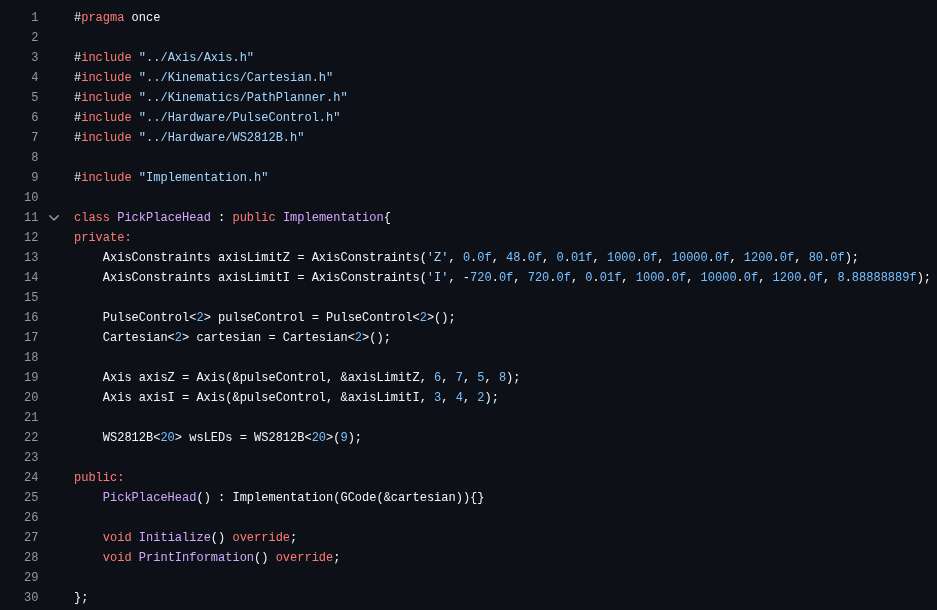


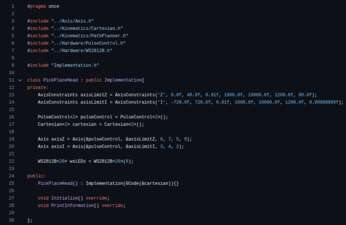


AetherControl is a streamlined and modular, C++ based motion-control firmware. It is built for real-time G-code parsing, motion planning, kinematics, and stepper-motor drive. Supports advanced kinematics like Stewart platforms, CoreXY machines, and Cartesian robots with dynamic trajectory planning. Implementations:
This includes features such as:
|
||
▸ ProxmoxScripts for Automated Infrastracture Management
| Website | GitHub | Contributors on GitHub | 2024 - Now |
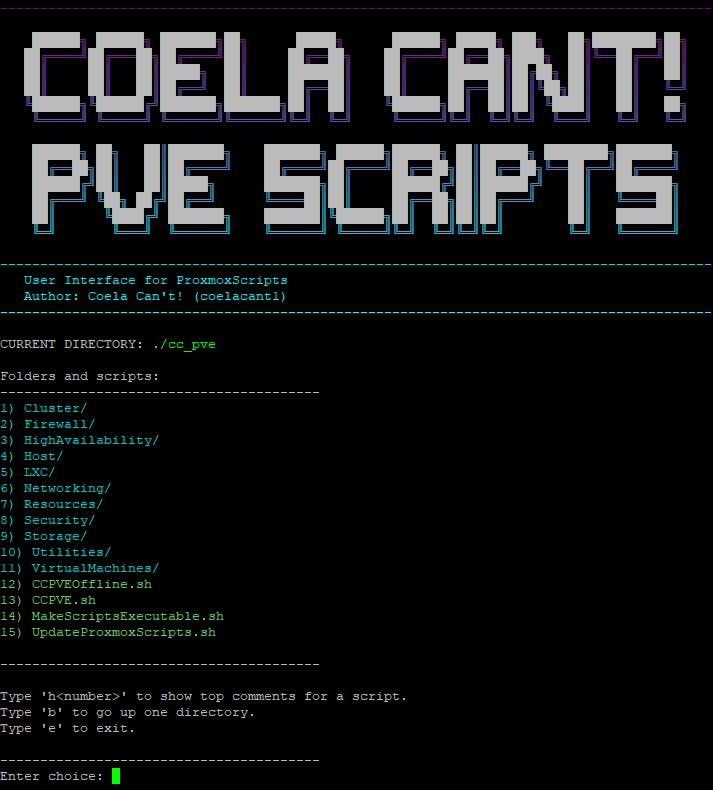
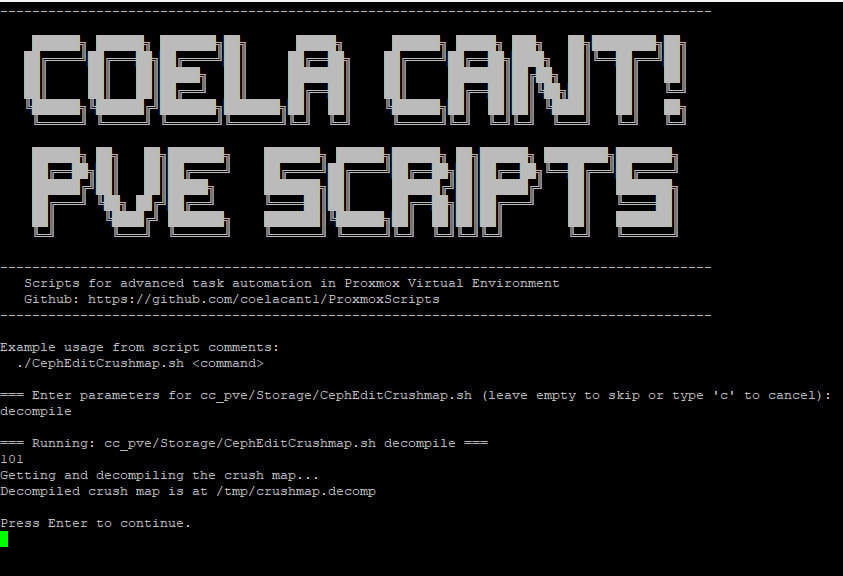
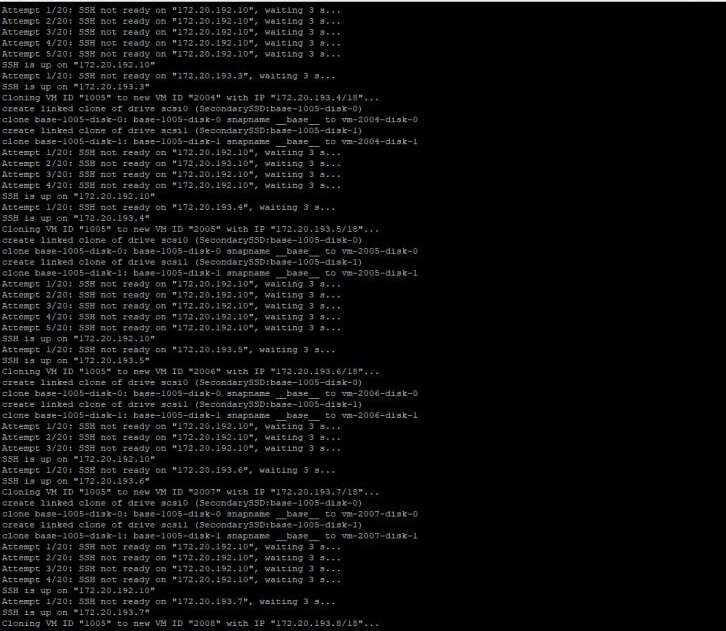
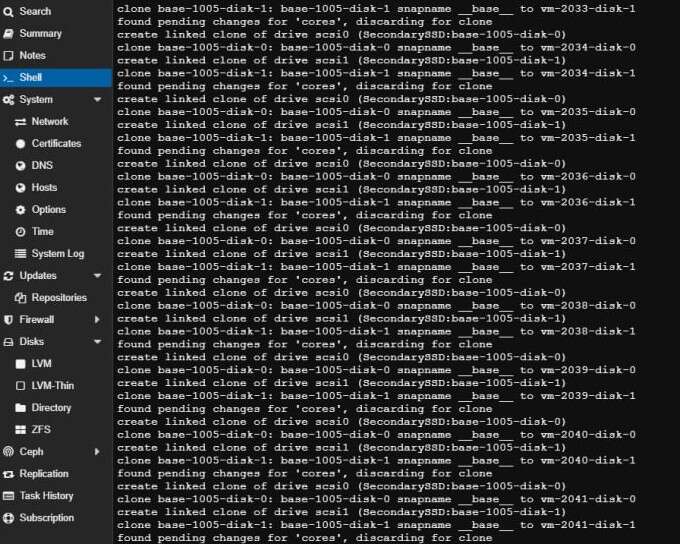
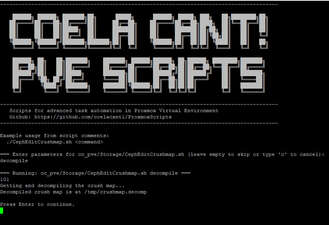
ProxmoxScripts is a collection of Bash scripts for streamlining and automating the management of Proxmox Virtual Environment (PVE) clusters. This was developed to help manage and automate Proxmox virtualization infrastructure. The scripts are accessible via a console-based menu for overview, navigation, and execution. Users can read help information for each script as well as get a description of required parameters. Features include:
|
|||
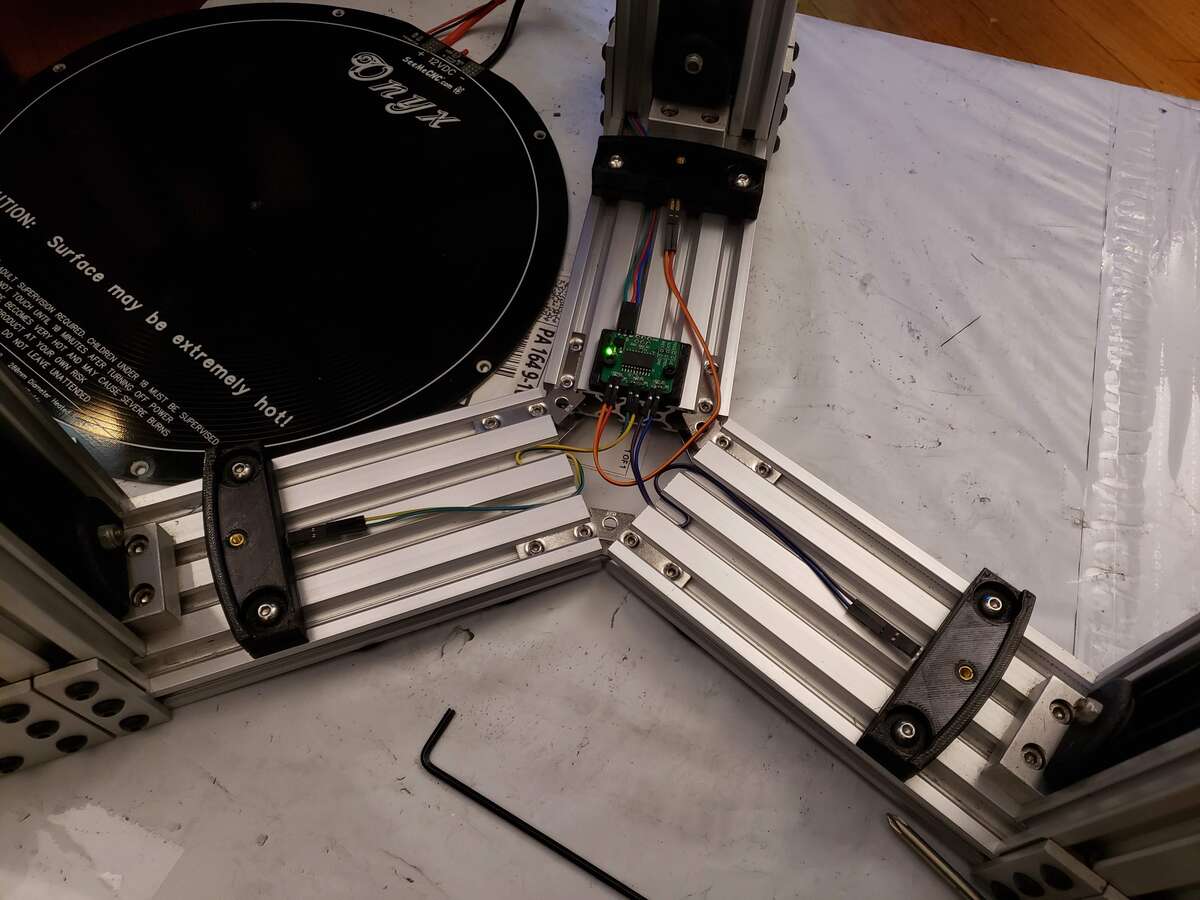
▸ OpenDACT: Automatic Delta Kinematics Calibration Software
| Github | Contributors on GitHub | 2014 - 2017 |
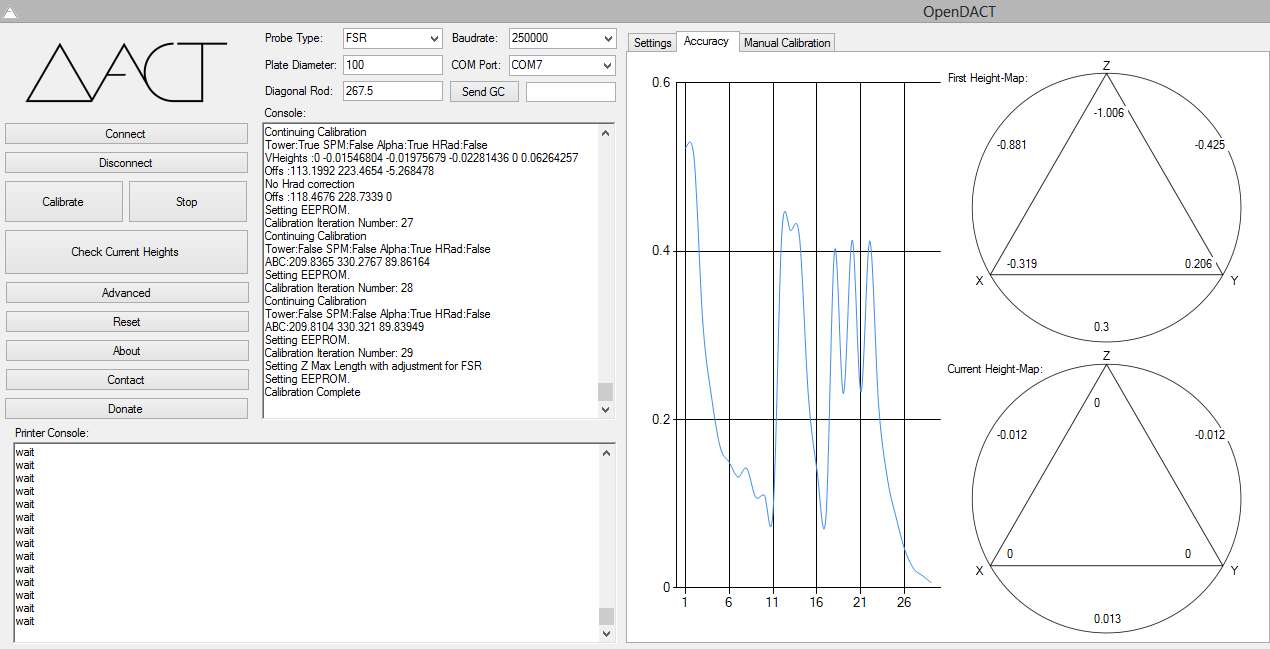
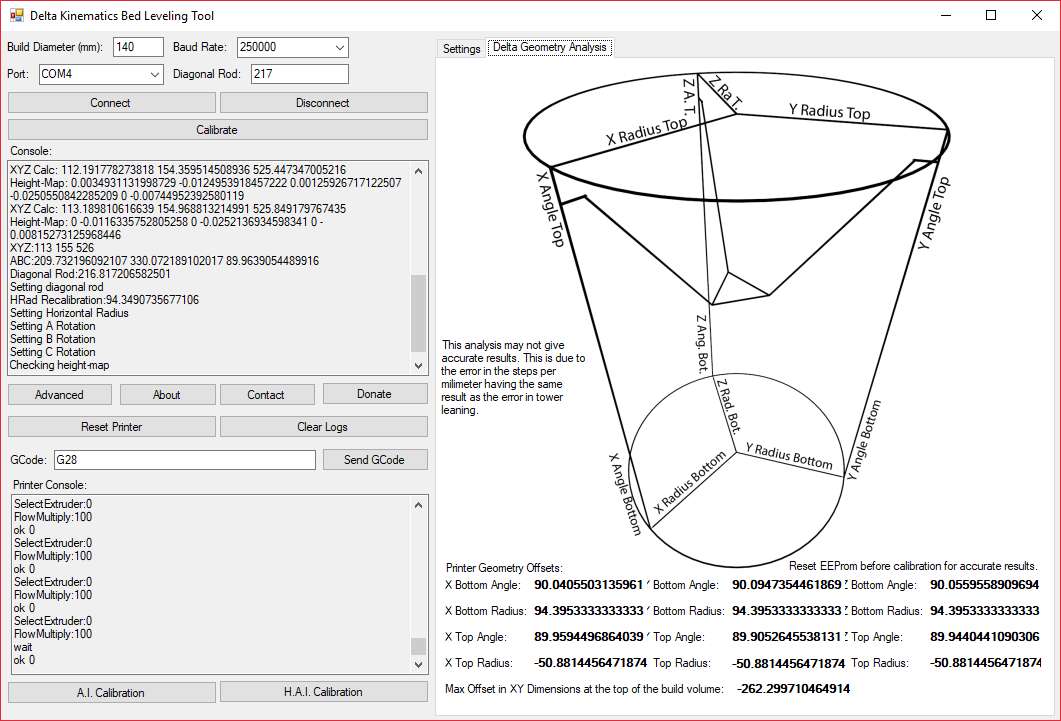
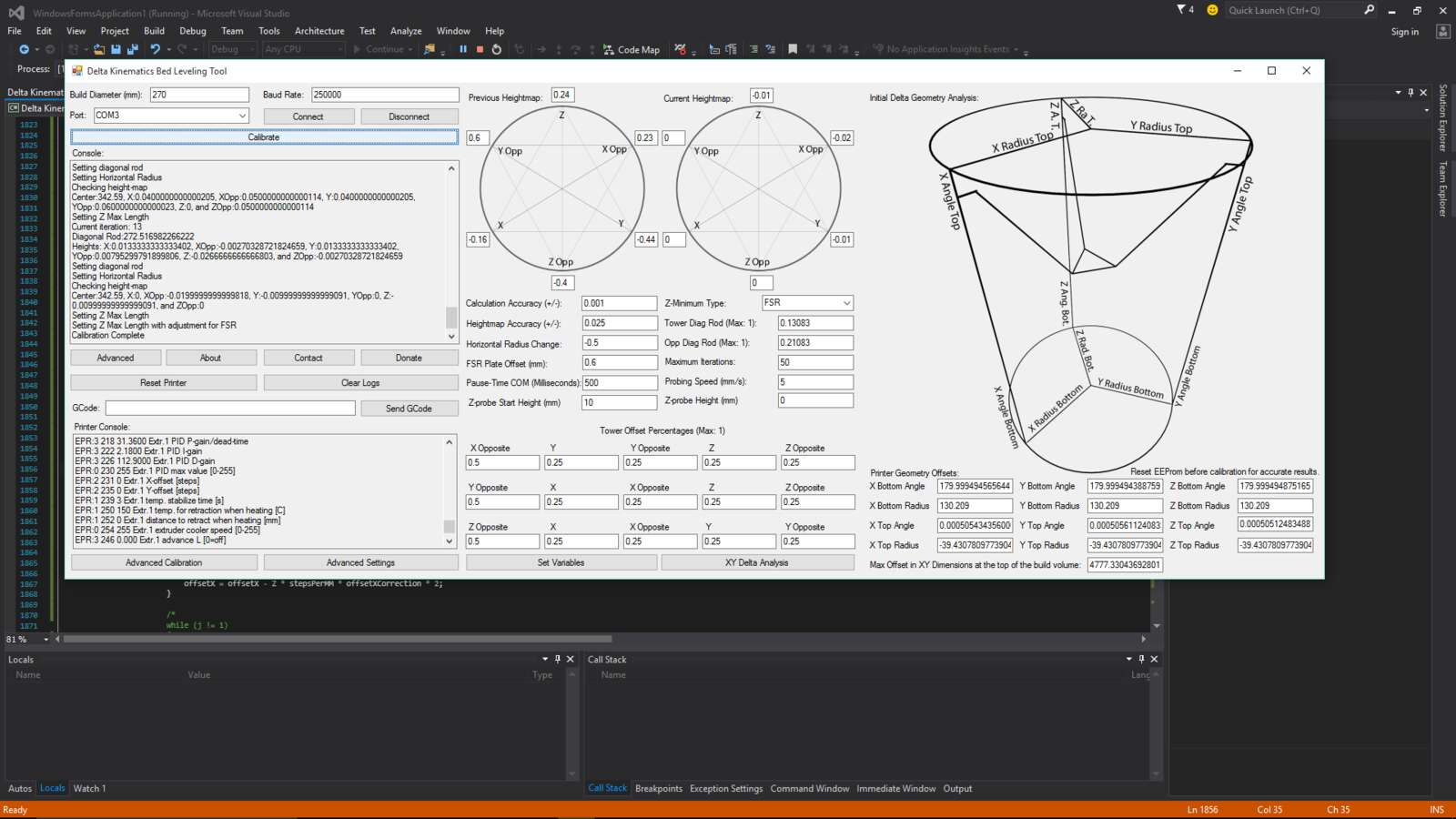
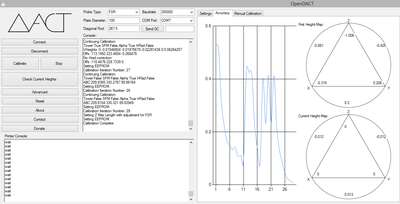
OpenDACT (Open-source Delta Automatic Calibration Tool) is a calibration tool for delta robots. It calibrates generic delta robots and automates calibration of Repetier-firmware-controlled delta robots (primarily 3D printers). The calibration uses forward and inverse kinematics measurements to make adjustments. It takes Z-height readings at key XY points on a flat plate (print bed) to iteratively calculate hardware offsets. Users can manually adjust hardware or apply software offsets to correct for imperfections. This software solves for the following mechanical offsets:
For Repetier based robots, these offsets are automatically saved on the controllers EEPROM upon a successful calibration. Z-bed distortion on a newly completed build could have offsets of +/- 2mm across the plate, this tool (assuming issues in the above offsets) can calibrate the systems down to 5-10 microns. This software has been tested and successfully used on small-form factor deltas (100mm plate diameter) and large-form factor deltas (1.5 meter plate diameter). |
||
▸ Proxmox VE Load Balancer
| GitHub | Solo Project | 2025 - Now |
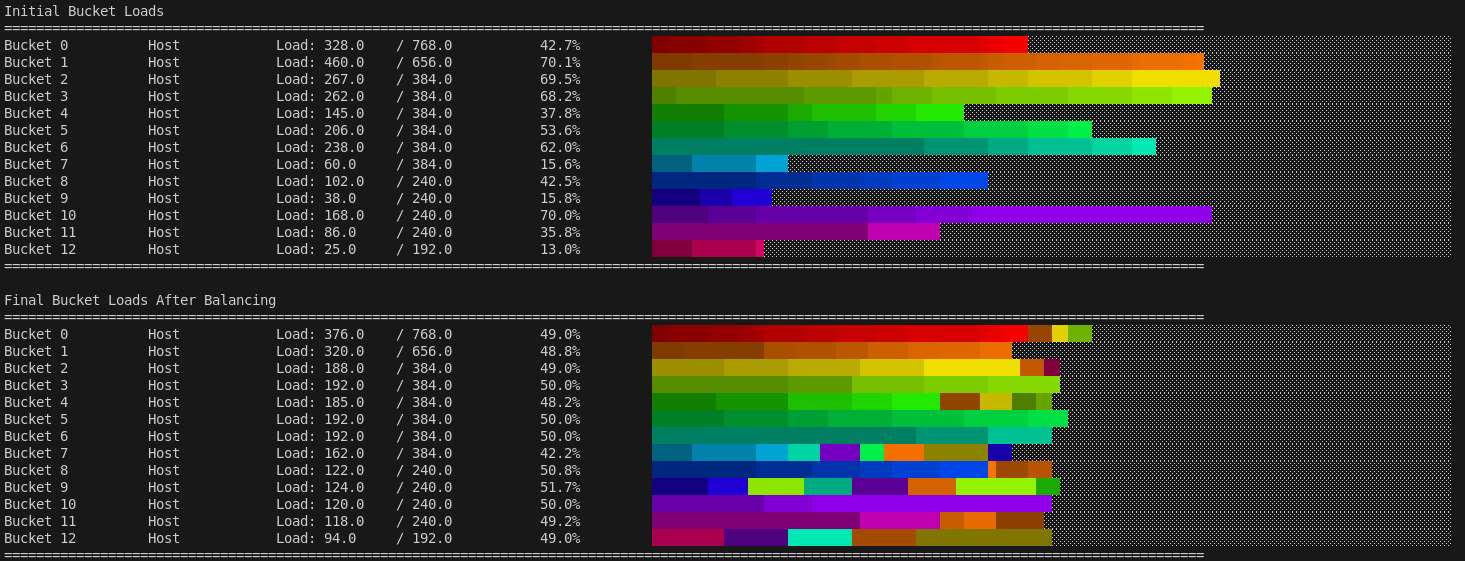
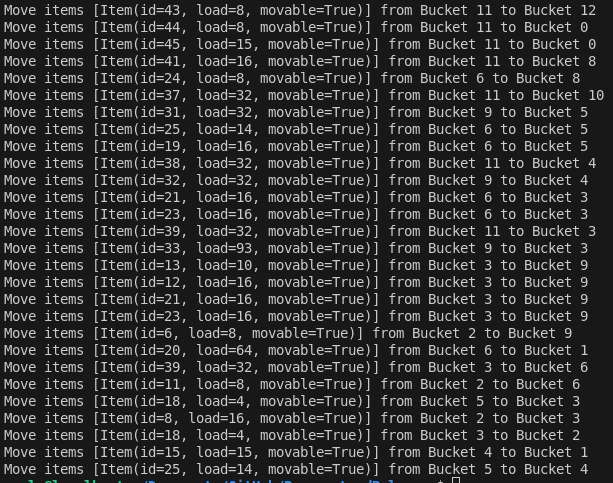
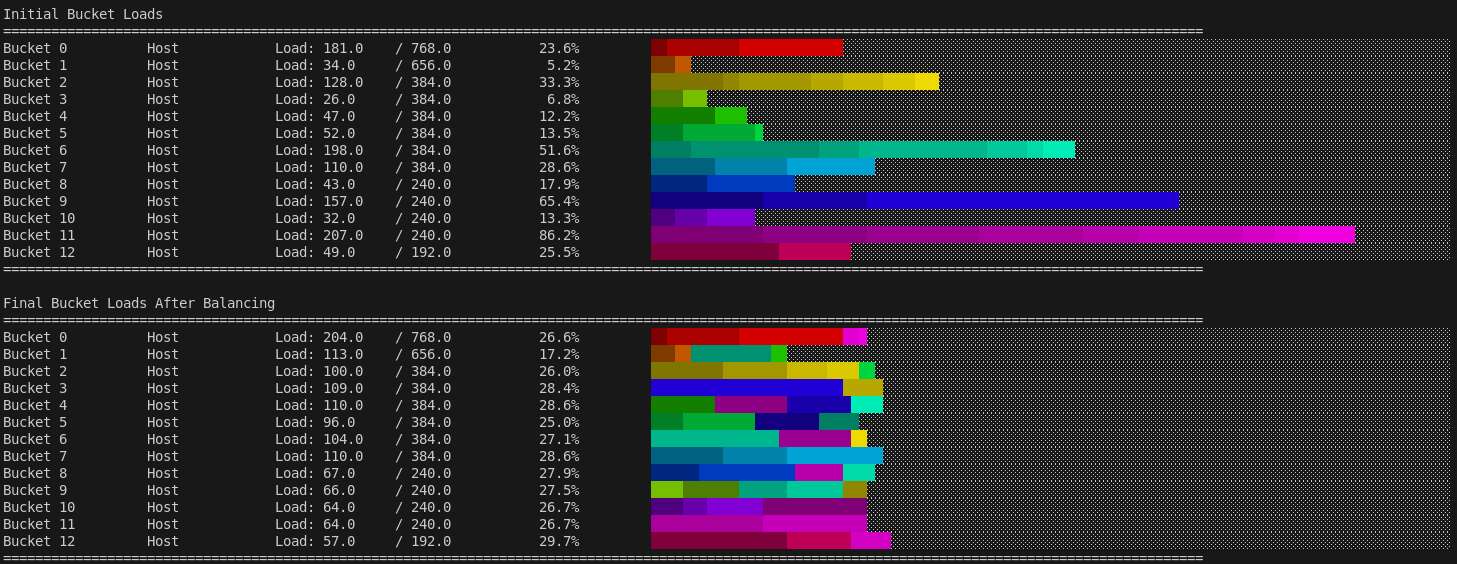
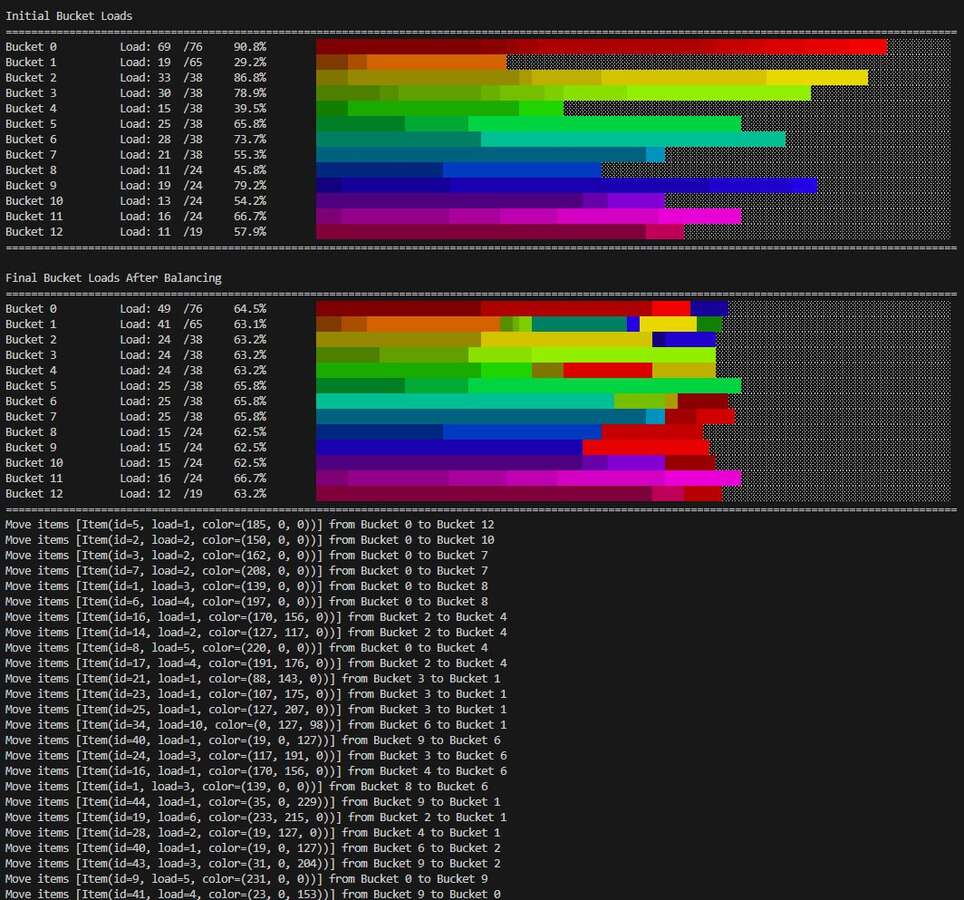
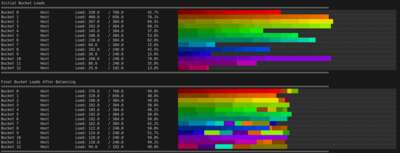
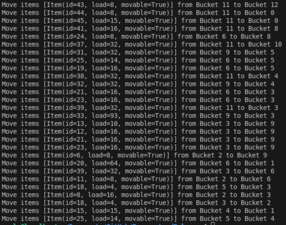
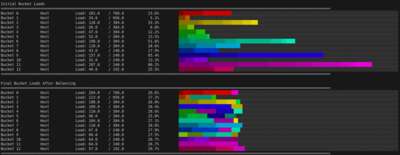
ProxmoxLoadBalancer is a Python tool that balances memory across Proxmox VE cluster nodes. It has two modes of operation:
This software is built as a stand-in until ProxmoxVE ships with a built-in cluster load balancer. |
||
▸ Teensy WebHID Firmware Loader
| Example Page | Github | Solo Project | 2025 - Now |
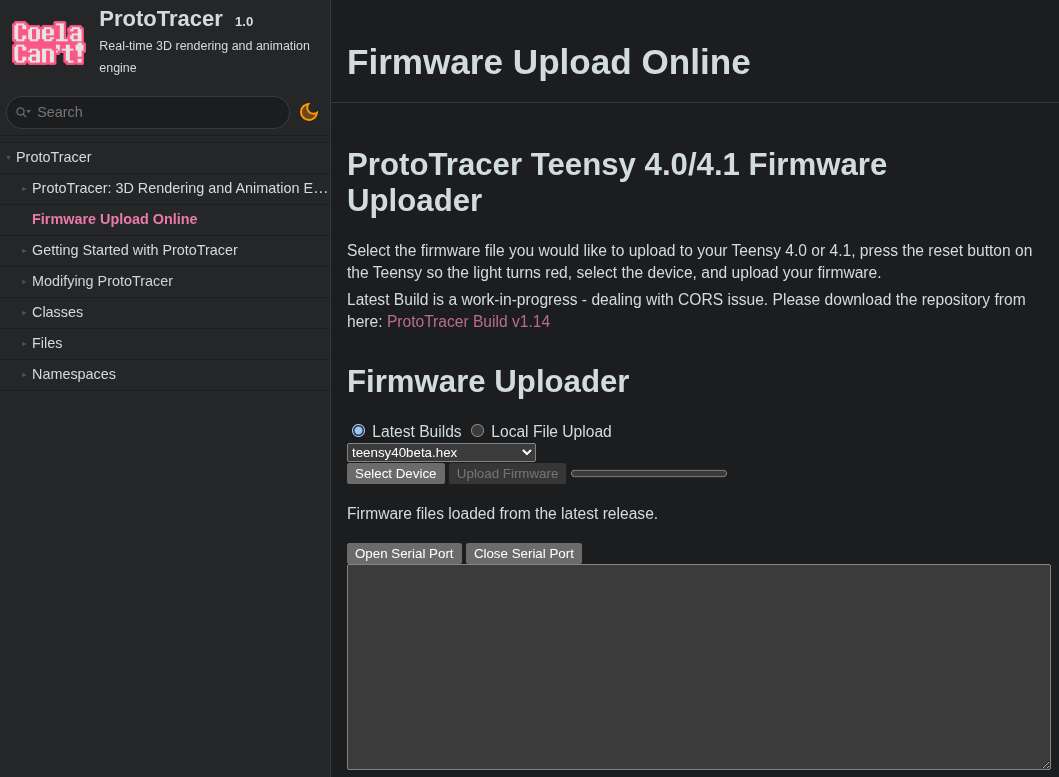
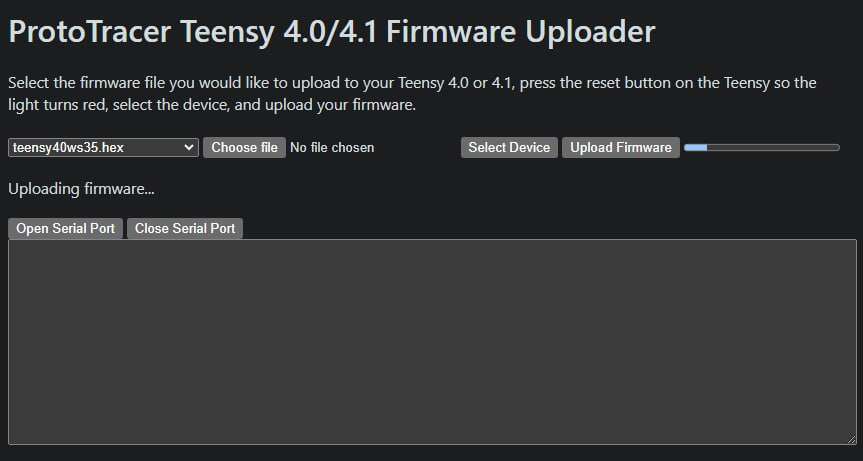
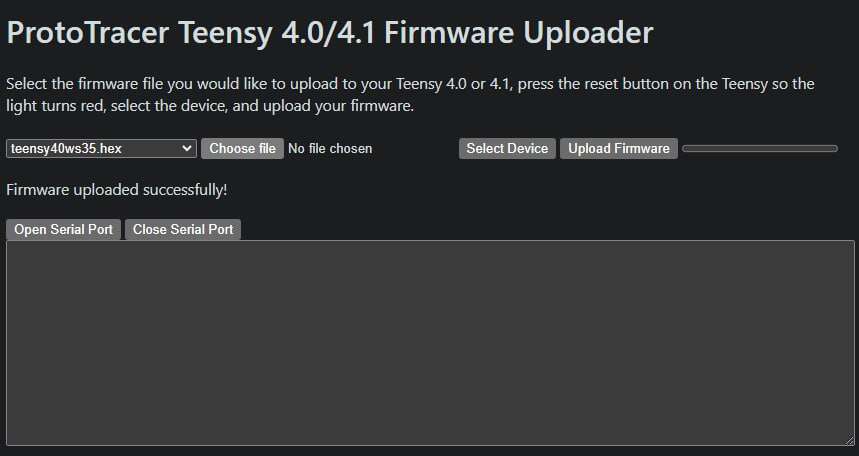
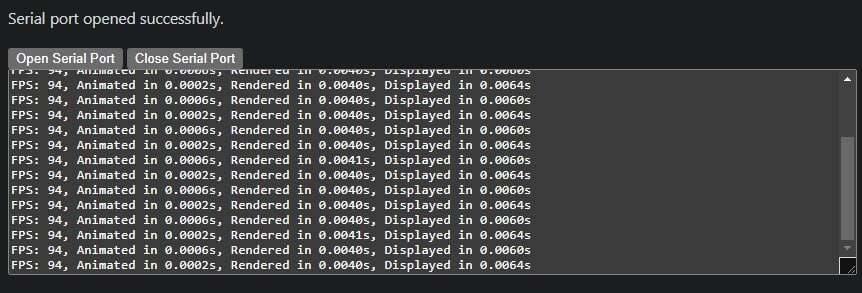

The Teensy WebHID Loader is a Chromium-based firmware flasher replicating PJRC’s Teensy Loader. It parses and uploads HEX and BIN files to Teensy microcontrollers, manages serial connections, and lets end users update device firmware without installing any software. |
|||
▸ Proxmox GPU Passthrough for Workstations
| GitHub | Solo Project | 2025 - Now |
A guide to running Proxmox VE as the base operating system for a high-performance workstation. Covers GPU and USB controller passthrough; multi-NUMA-node CPU optimization; BIOS and GRUB tweaks; VFIO module setup and driver blacklisting; microcode updates and GPU ROMs; tuning CPU affinity; network-stack optimizations; Windows/QEMU adjustments for Easy Anti-Cheat compatibility; example VM setups; and benchmarking results. This enables users to run high-performance workstations in various configurations while keeping things easy to manage, since each VM can be tuned for its specific OS or software. |
||
Product Prototyping and Engineering
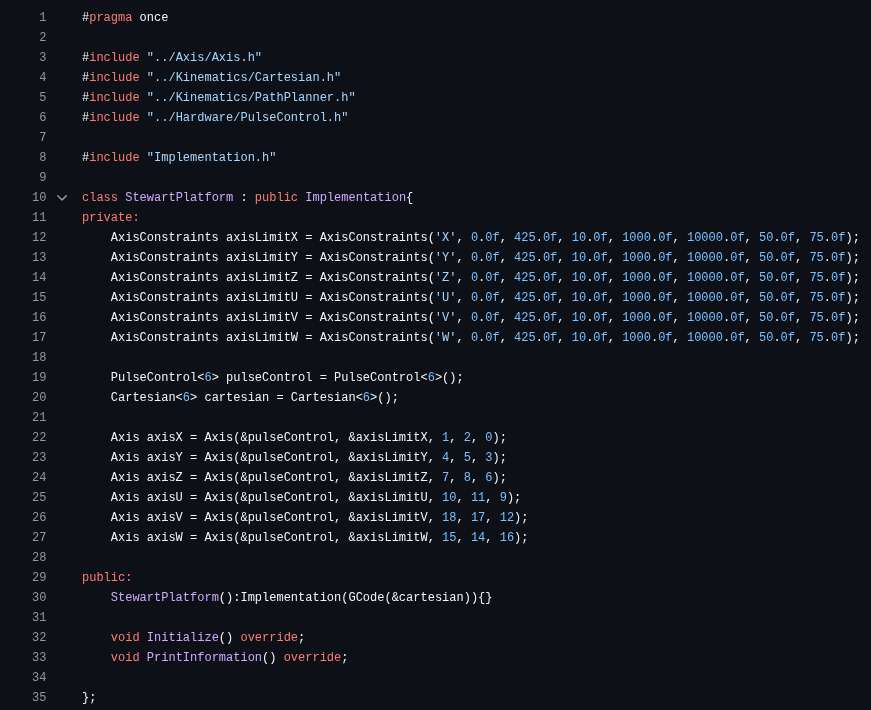
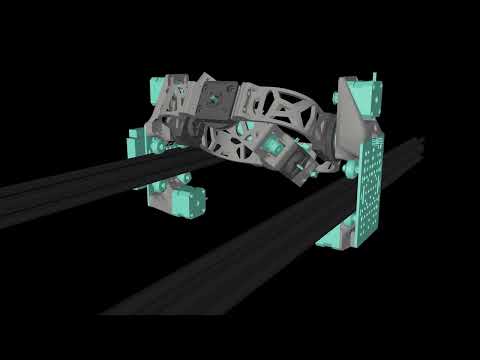
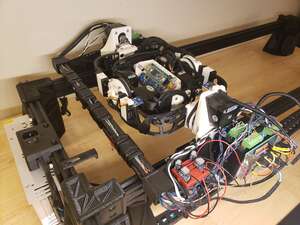
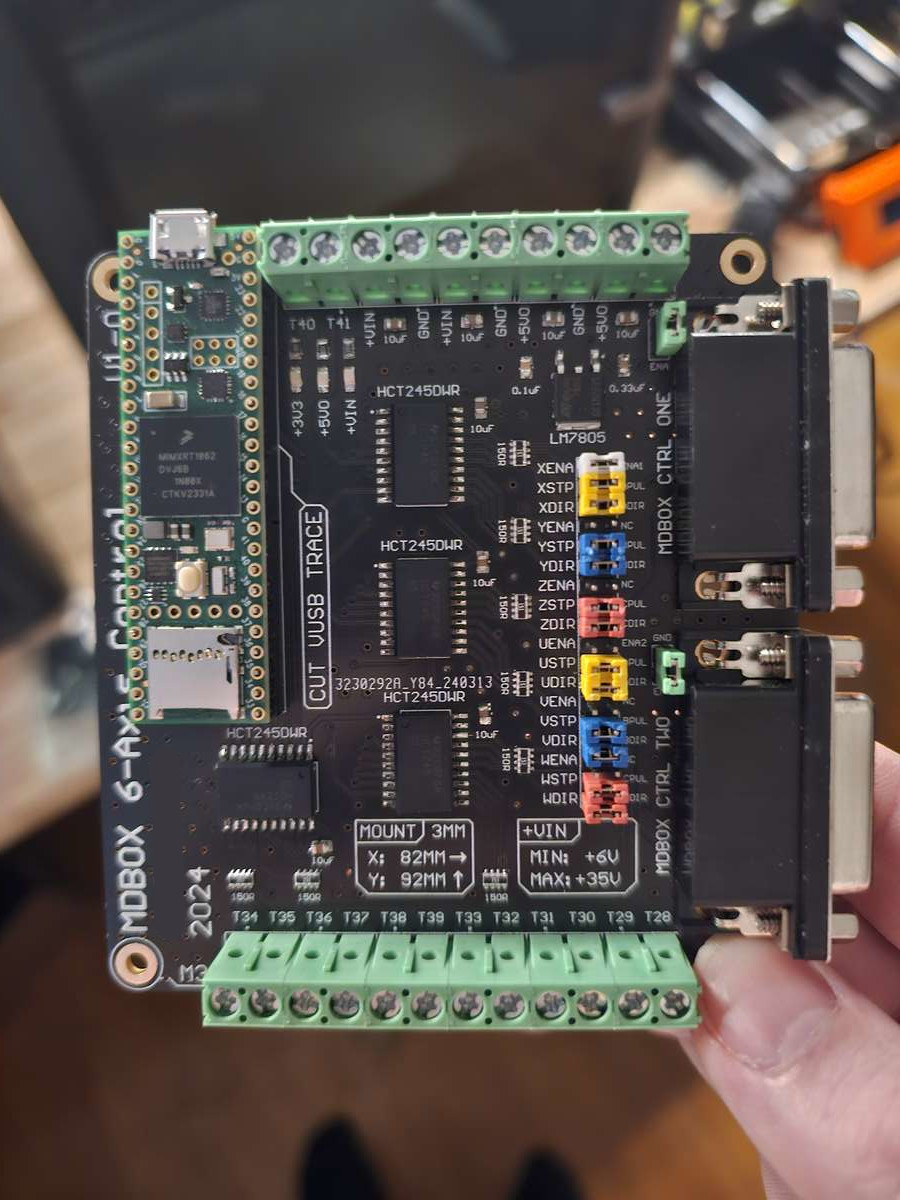
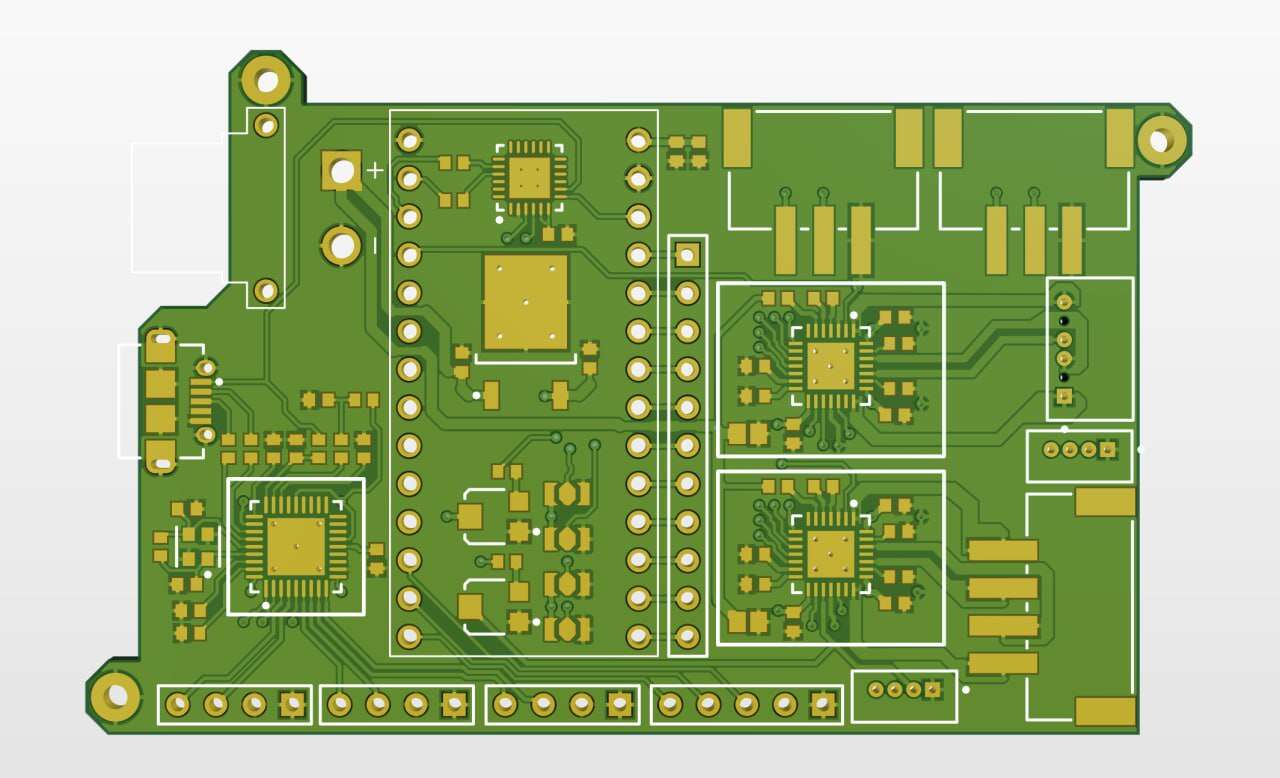
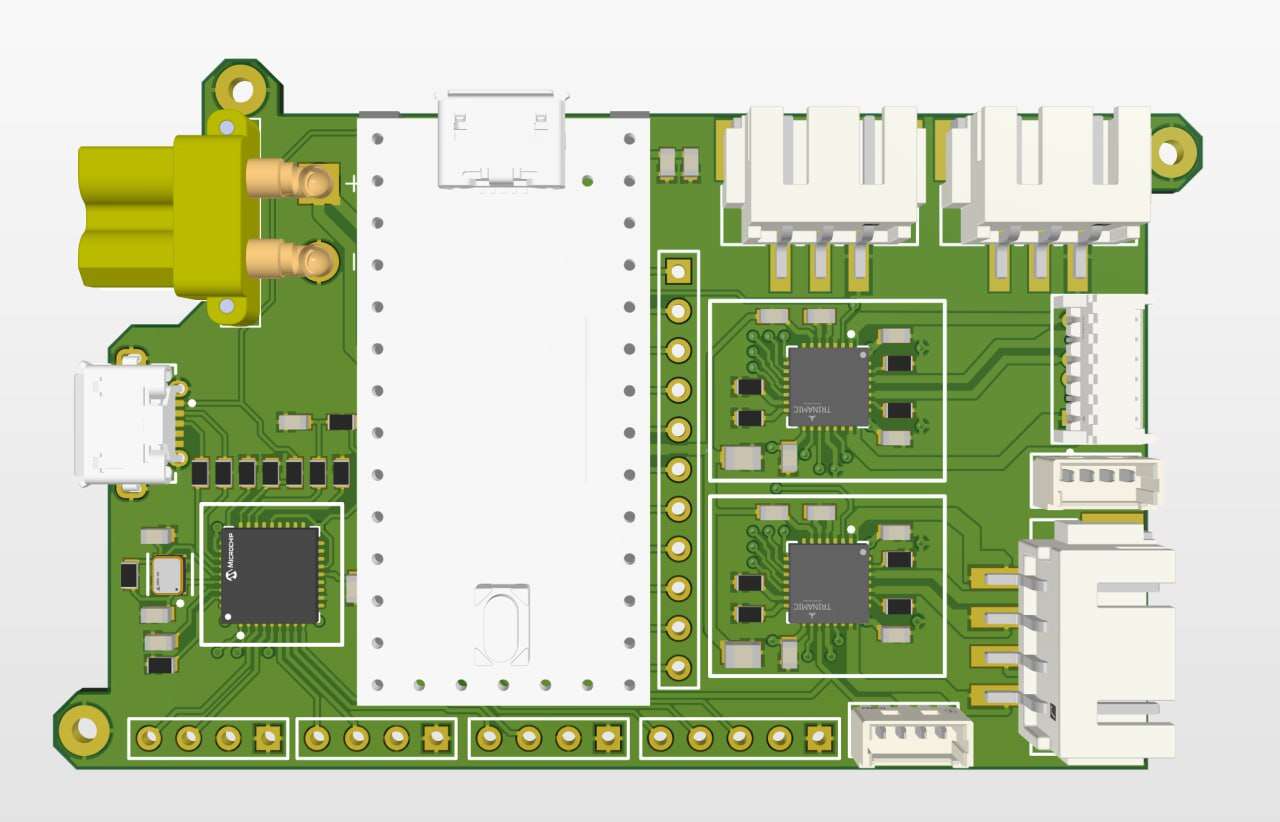
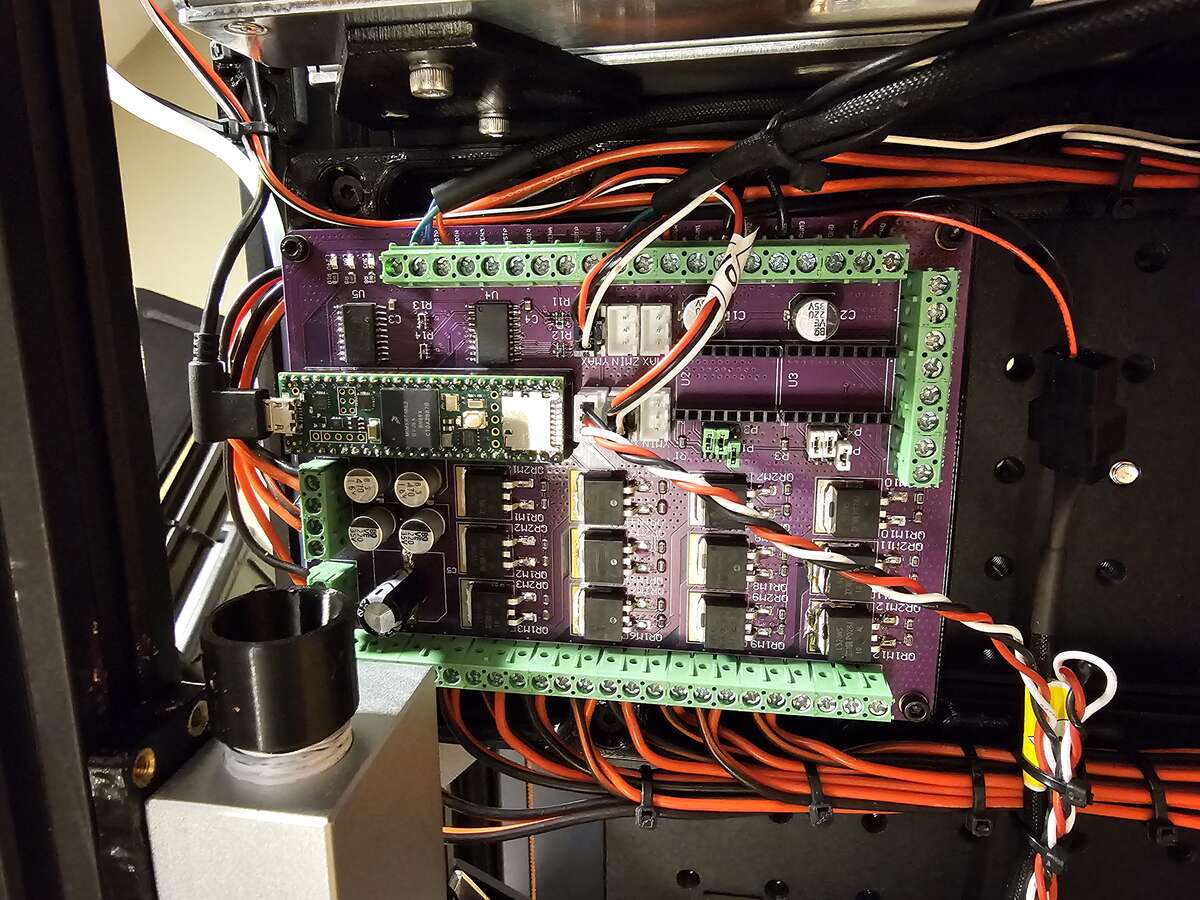
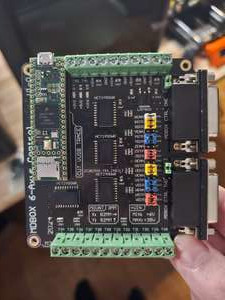
▸ Stewart Platform - Firmware and Hardware for Flight Simulator
| Github | Hardware/Software Solo | Research by Co-workers | 2020 - Now |

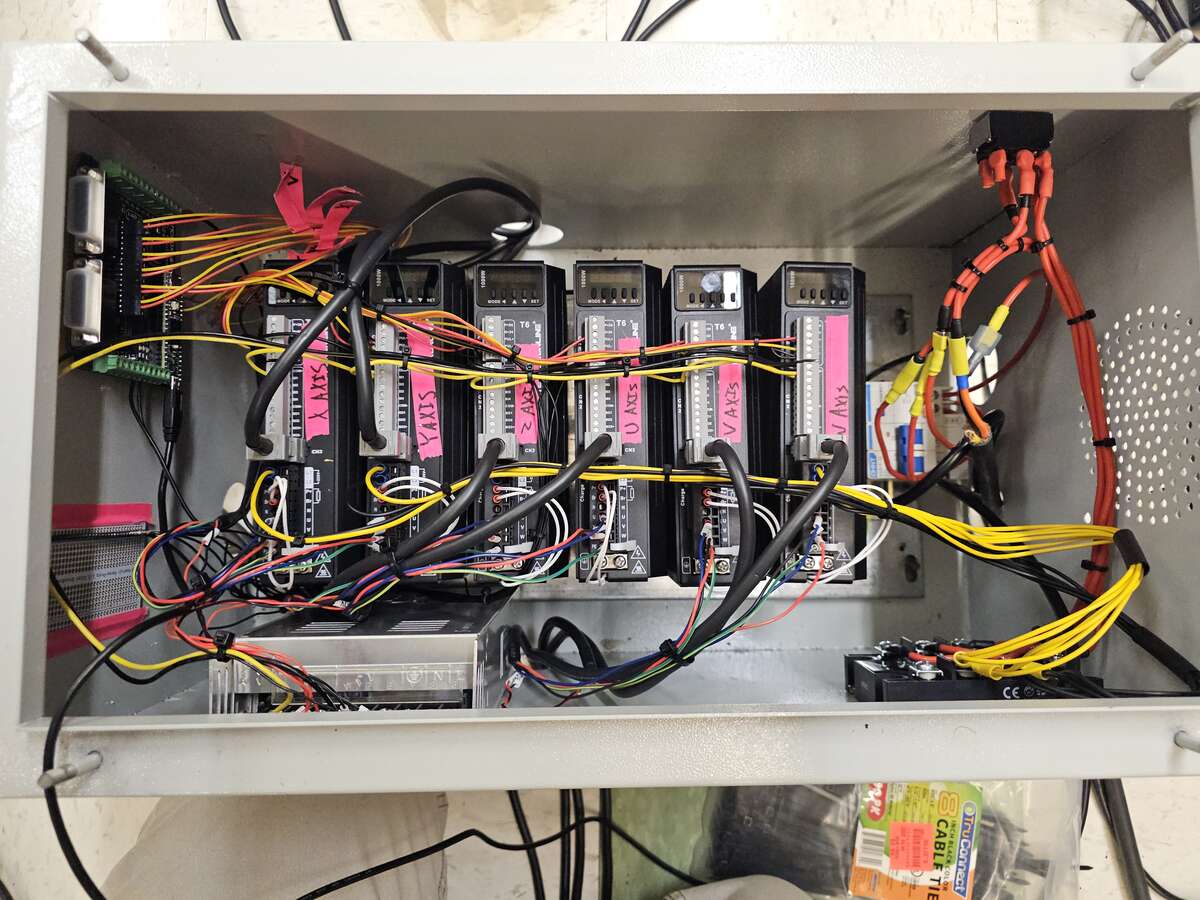
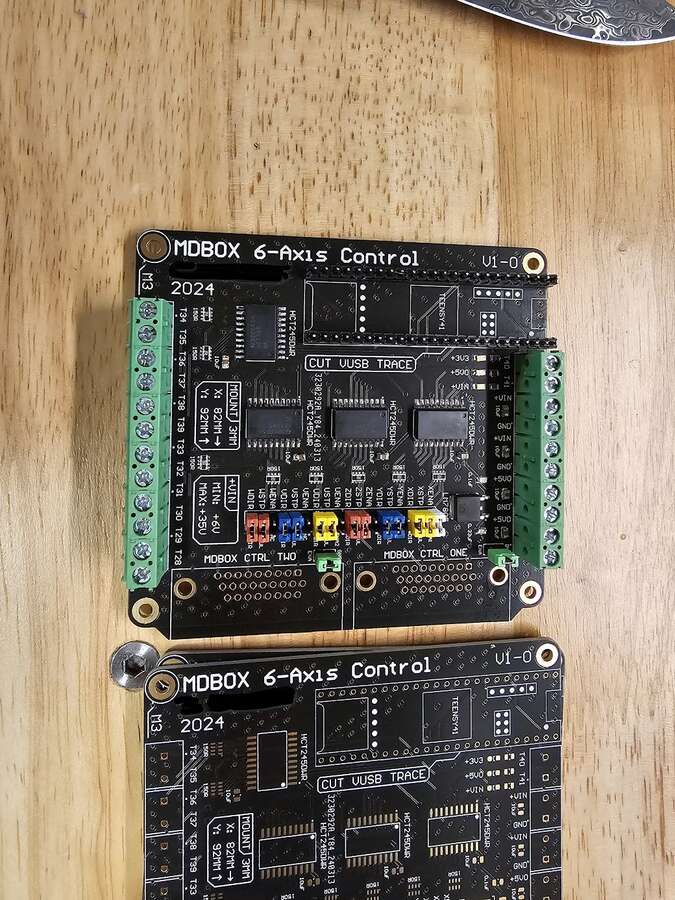





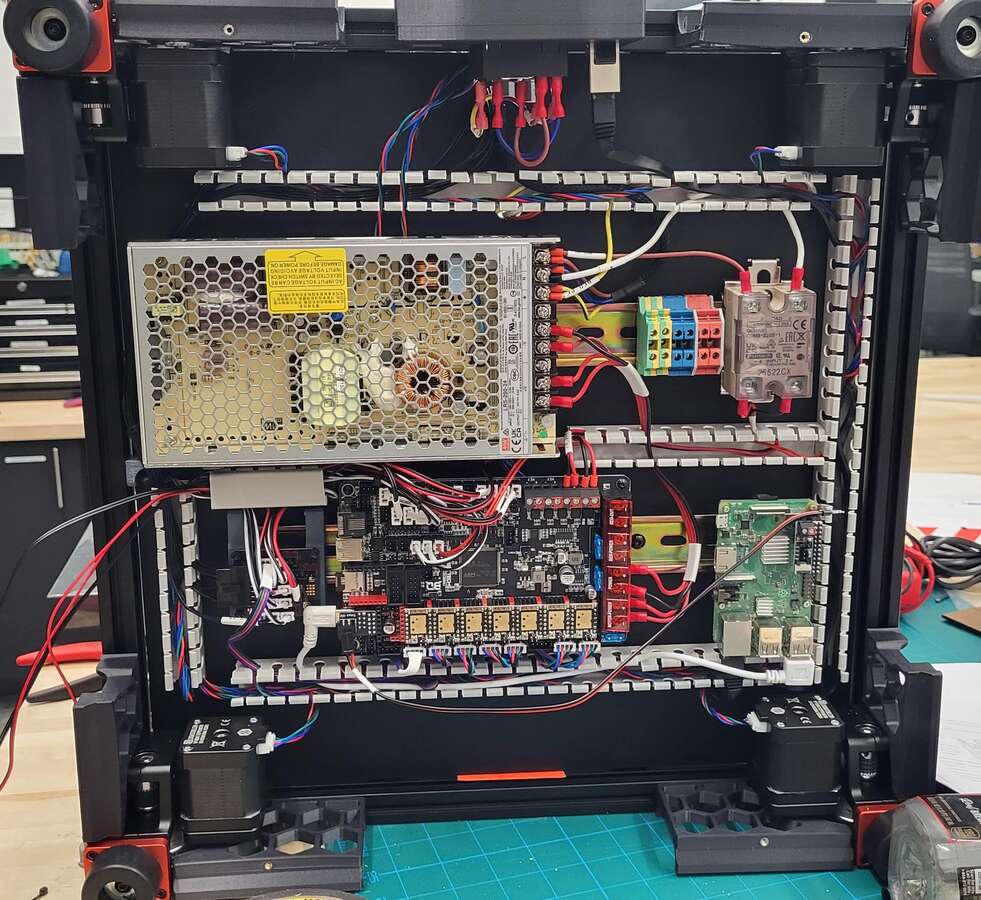
The Stewart Platform project is an adaptation of a commercial system. The machine originally shipped with MDBox motion controllers, controlled via ethernet. Because of high latency it was adapted with a custom controller, upgraded 1000W AC servos for the linear actuators, and custom firmware and software. This was the start of the AetherControl project detailed above. The attached repository contains the interface code that takes target XYZ Cartesian coordinates and Euler rotations, then computes the six actuator lengths for AetherControl. The goal of the project was to adapt the system to handle high-frequency vibration and high-speed motion for research on flight dynamics. The inverse kinematics repository allows for custom user-defined configuration parameters, taking in:
Users can input an XYZ cartesian coordinate and Yaw-Pitch-Roll to get a returned value of each of the 6 actuator lengths. |
||
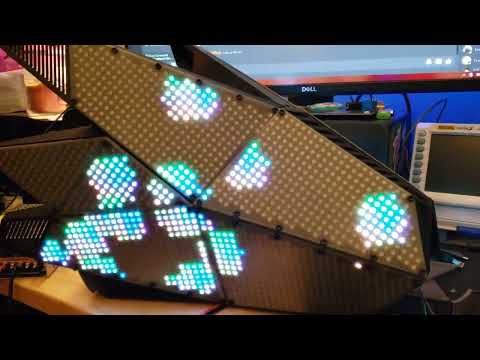
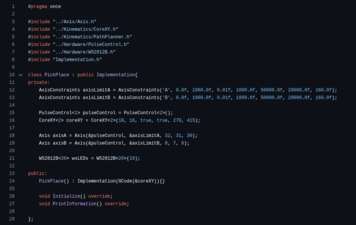
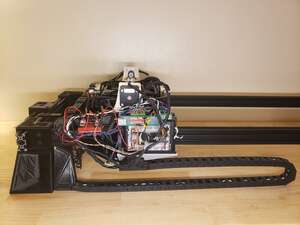
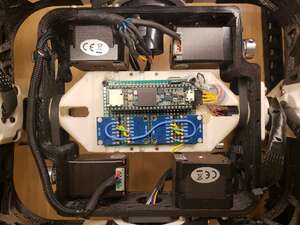
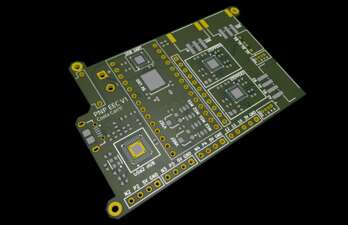
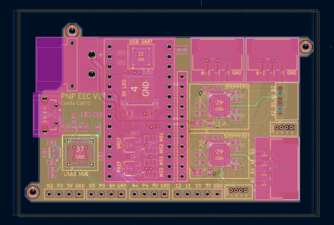
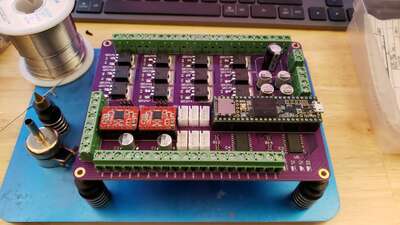
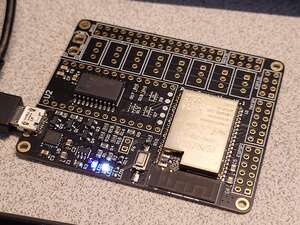
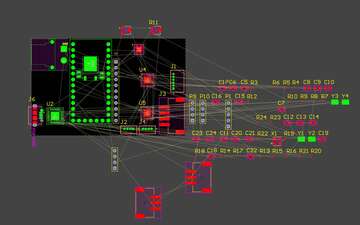
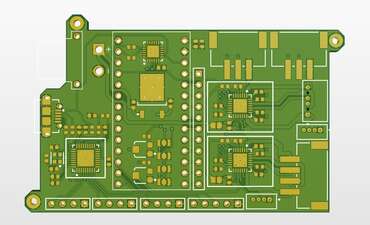
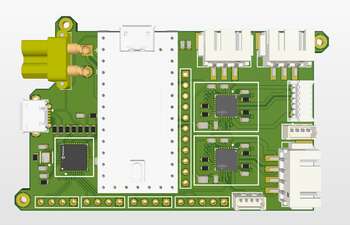
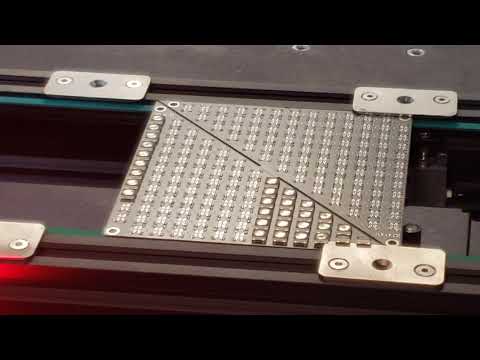
▸ Custom High-Speed CoreXY Pick-and-Place
| Github | Solo Project | 2021 - current |



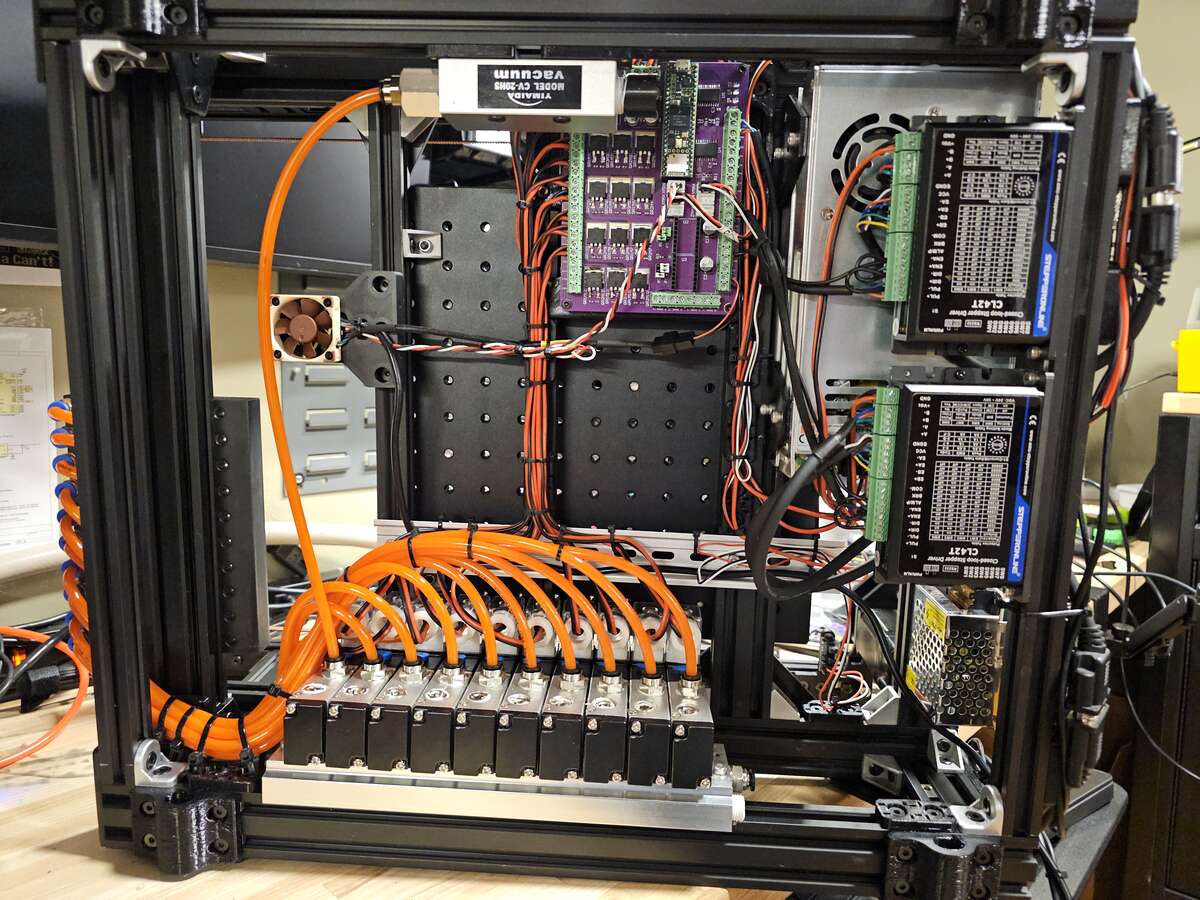
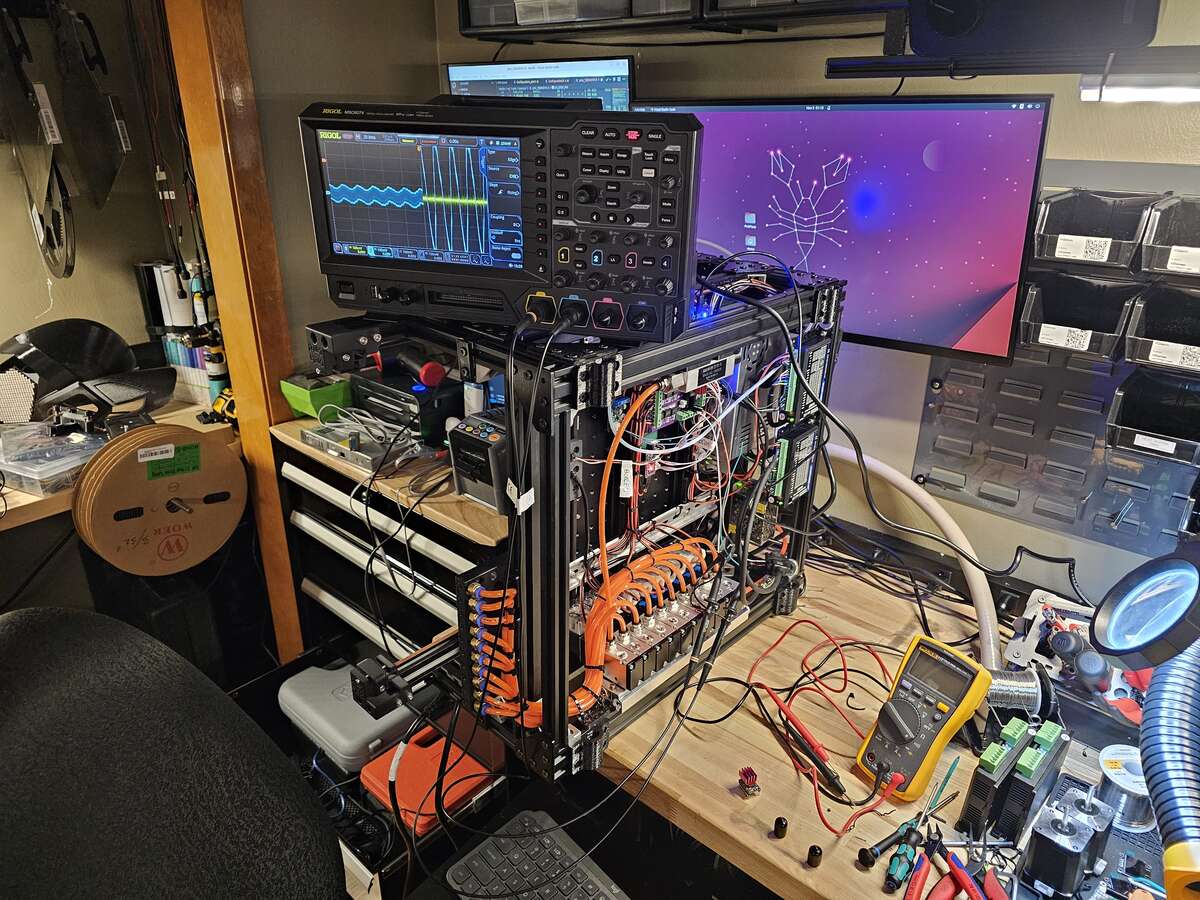

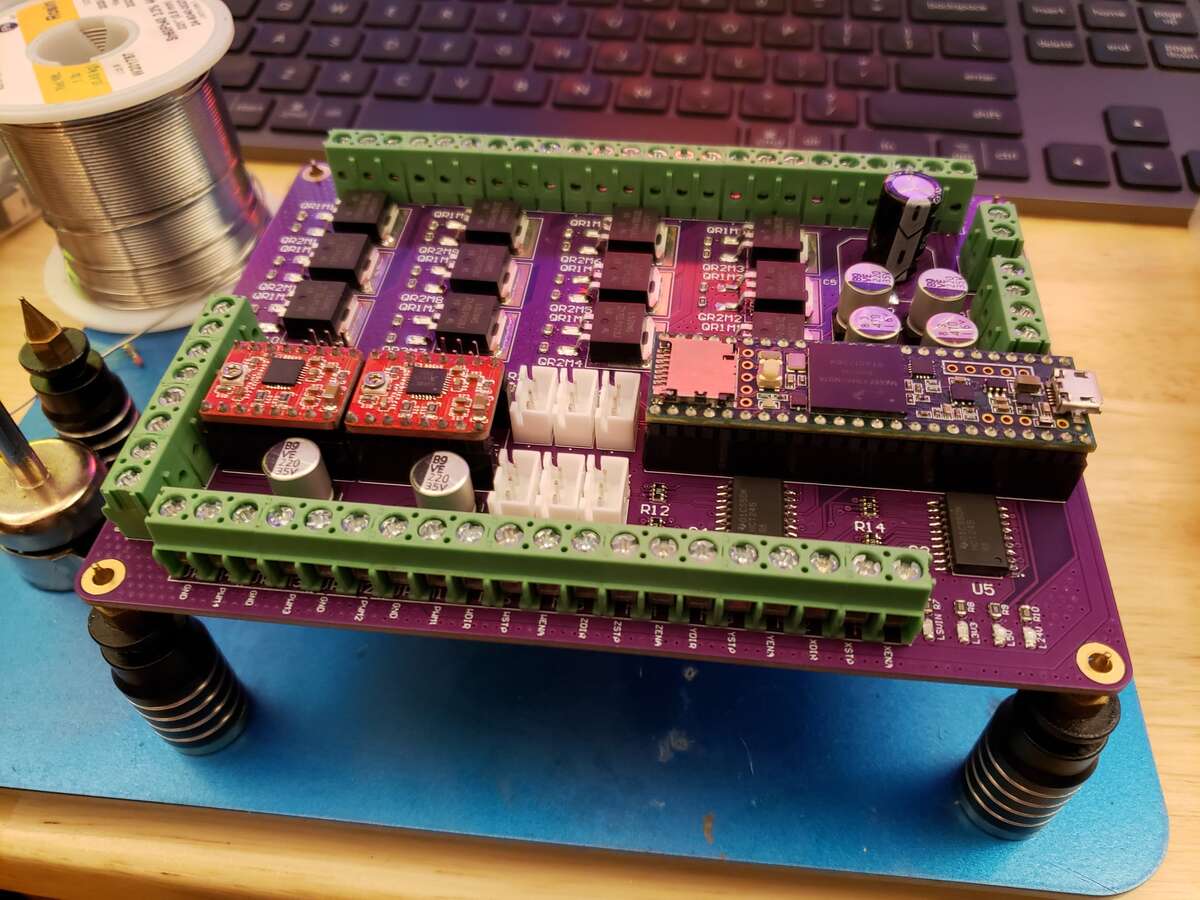

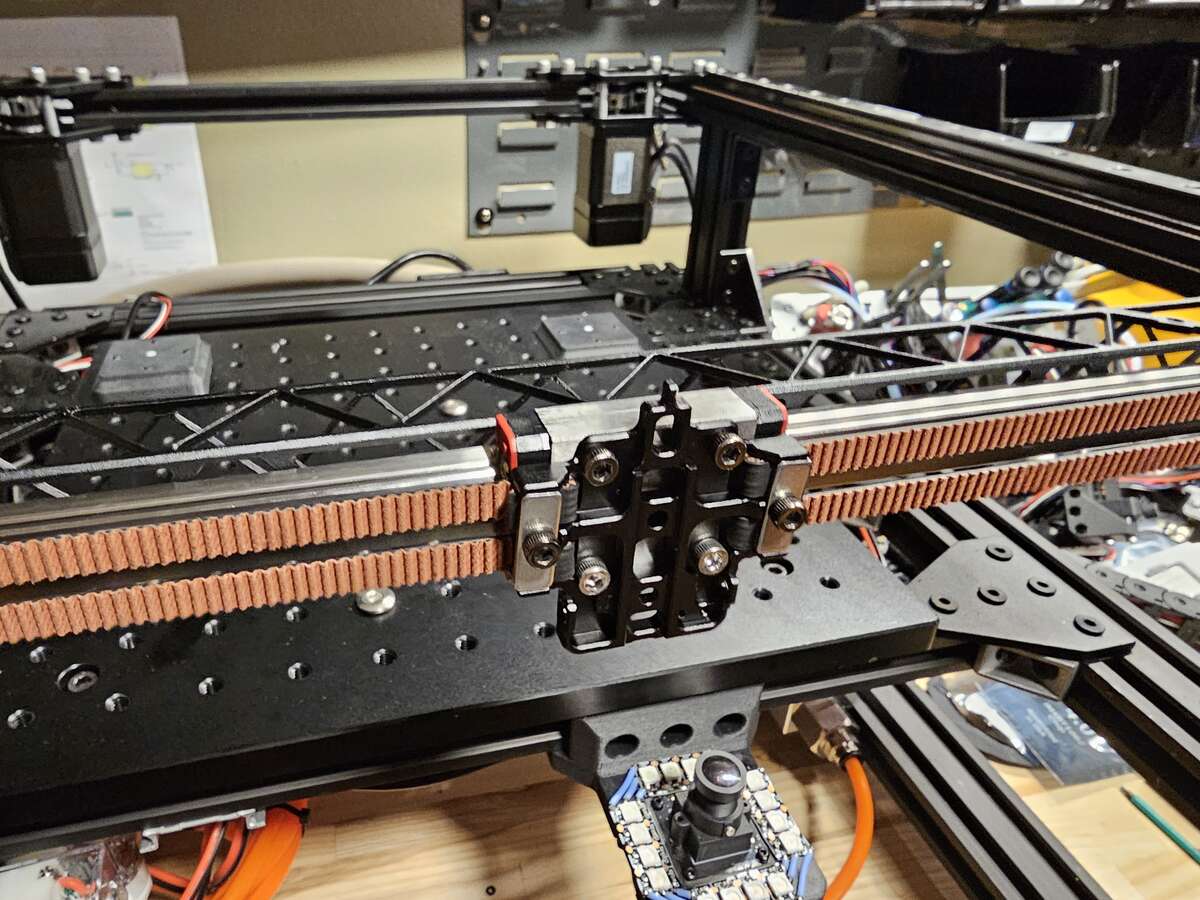
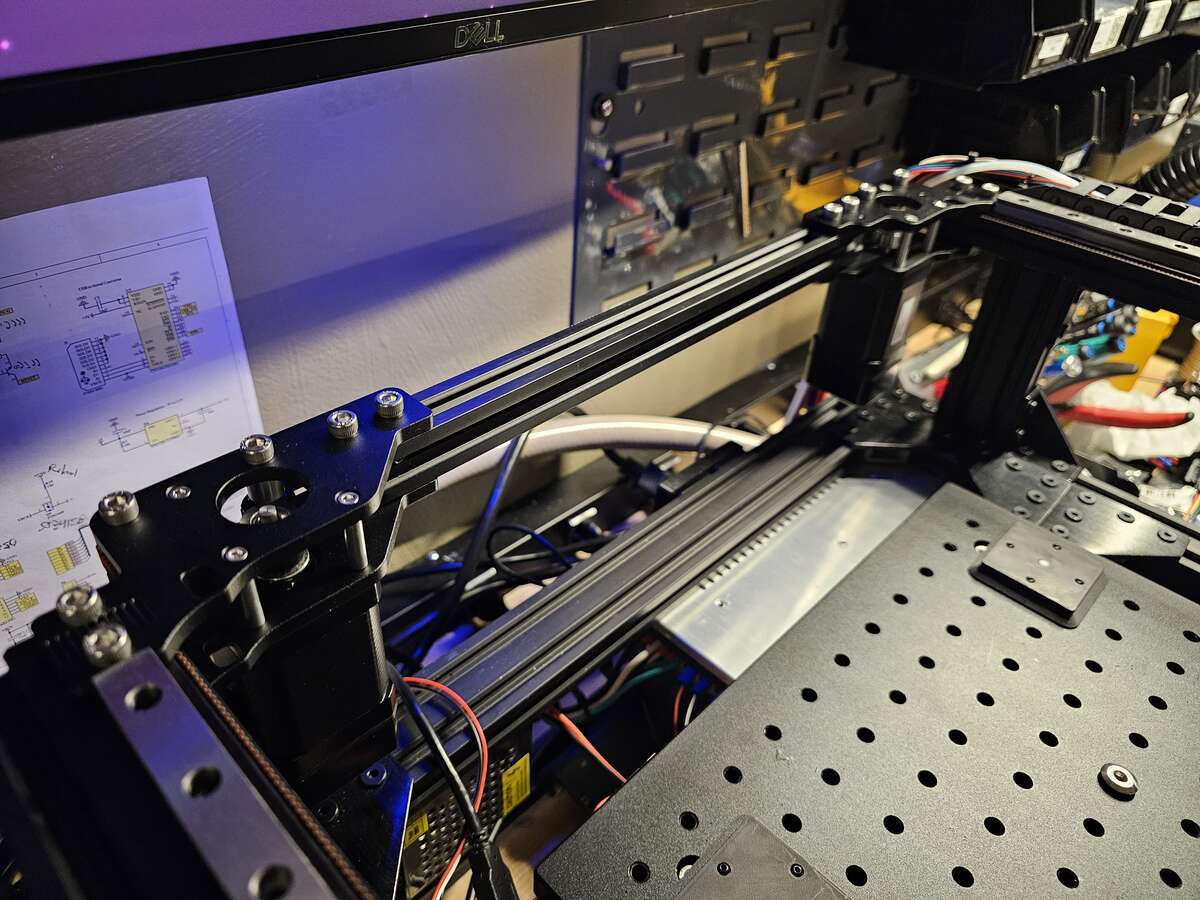
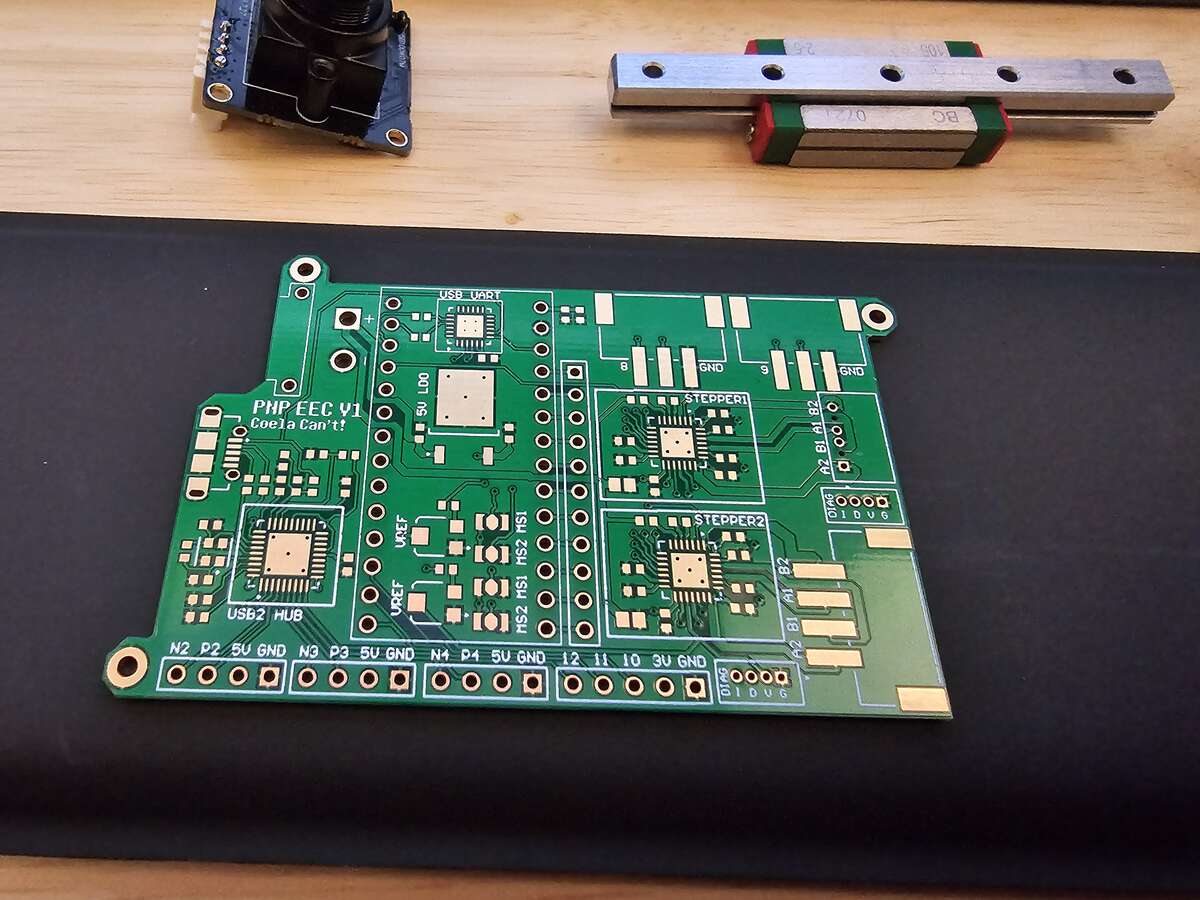
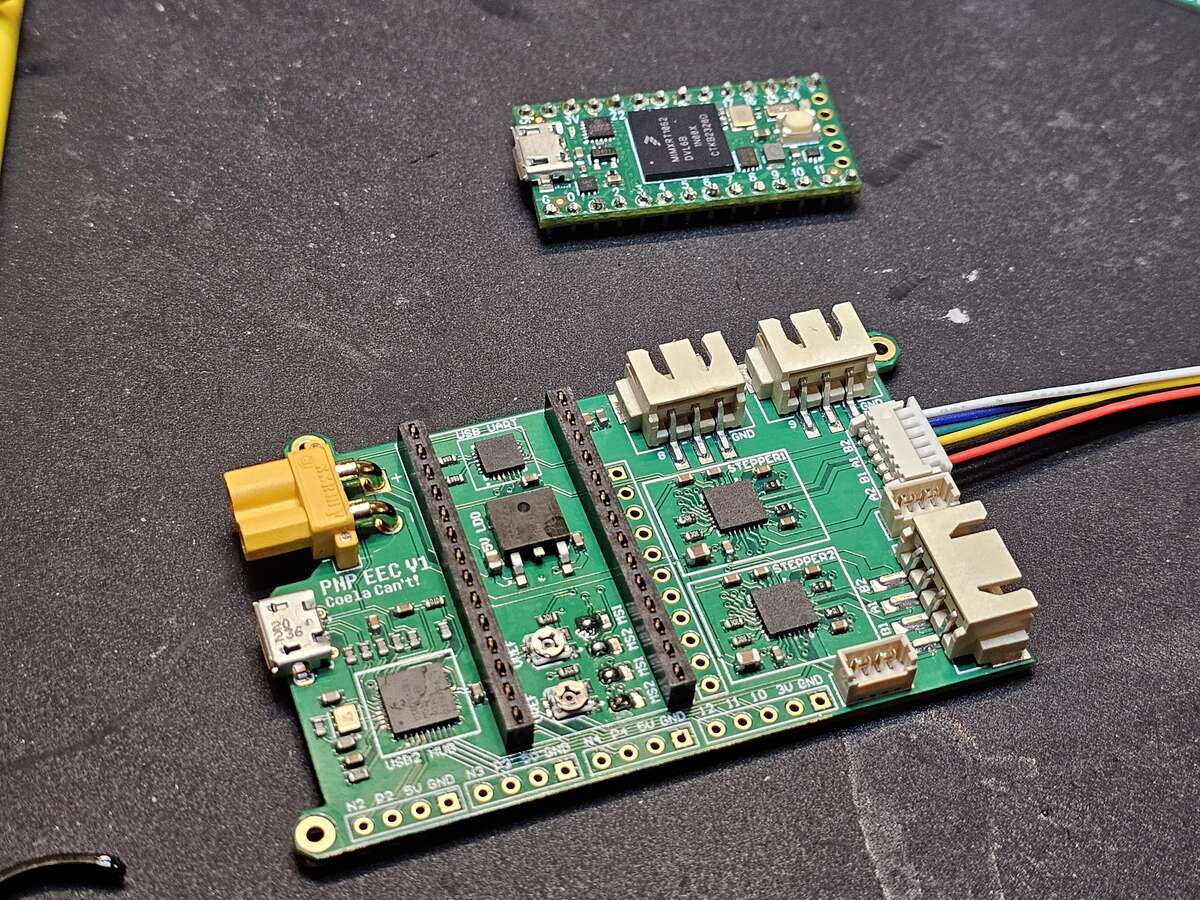
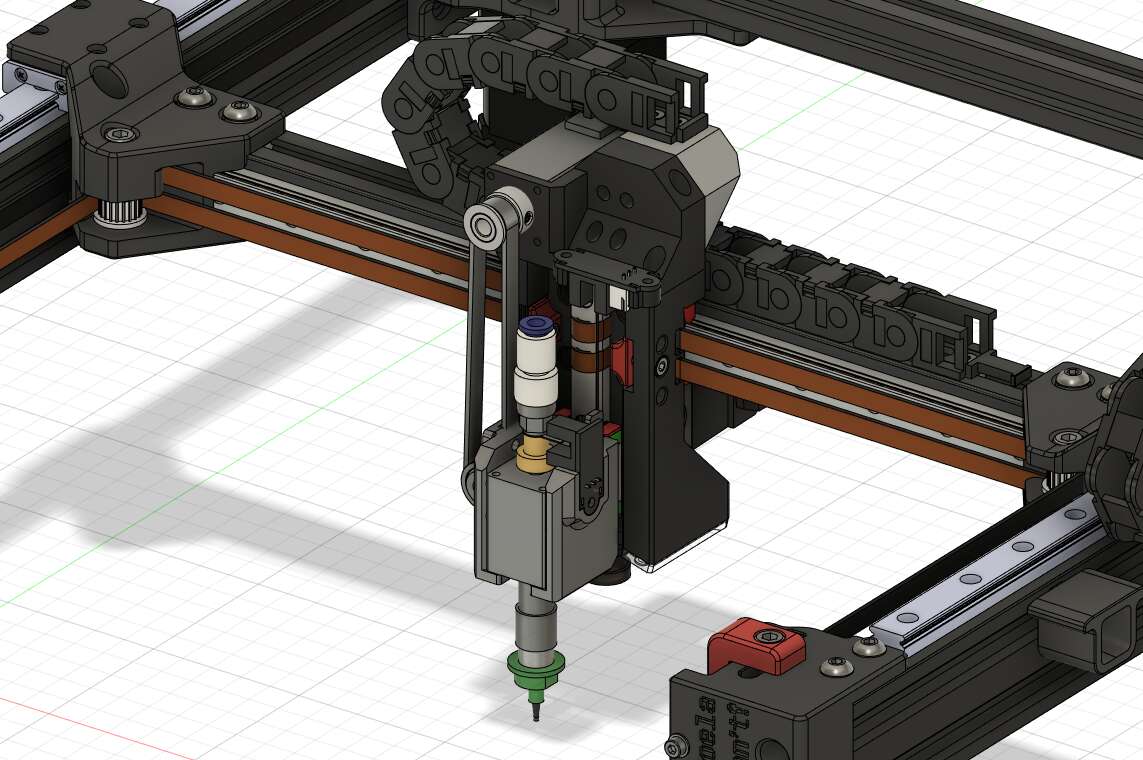

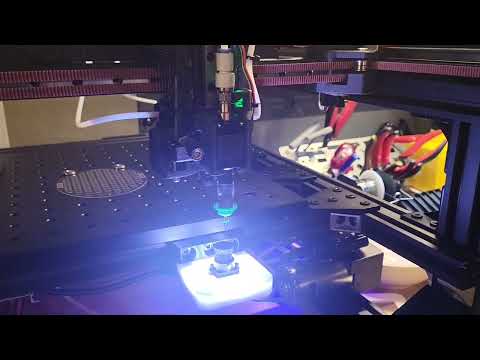

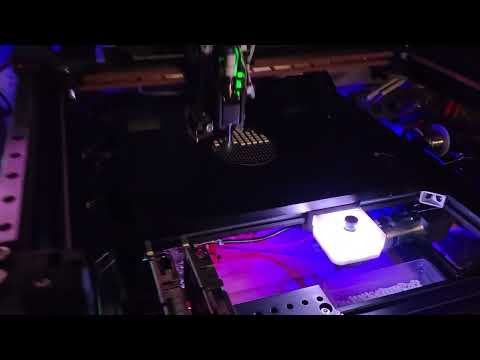









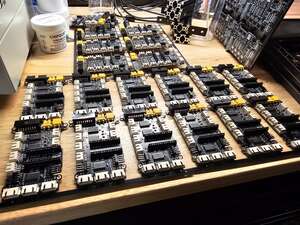
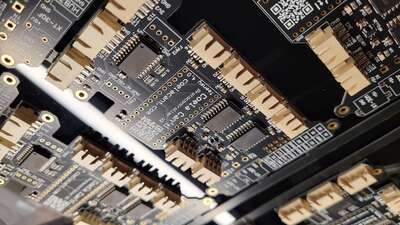
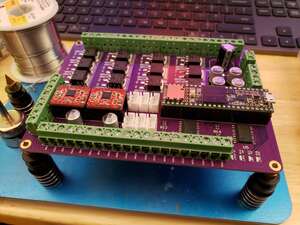

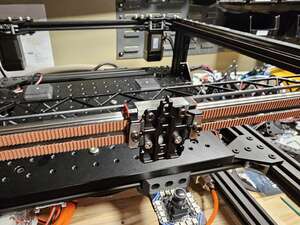
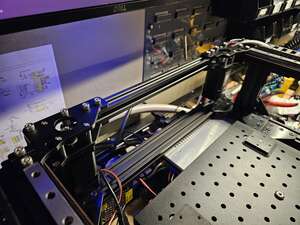

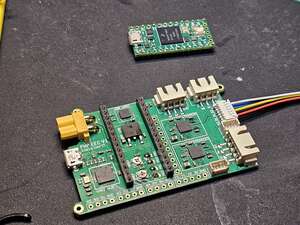
This project started was to create a small yet capable Pick-and-Place machine. This machine has been used to manufacture RGB LED displays which each have over 500 LEDs, power distribution boards, custom LED control electronics, etc. Features:
|
||
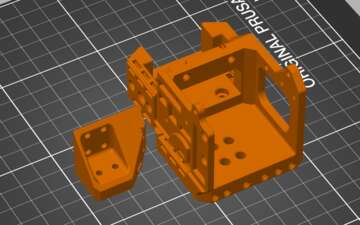
▸ Custom High-Speed Delta 3D Printer
| Solo Project | 2014 - 2019 |
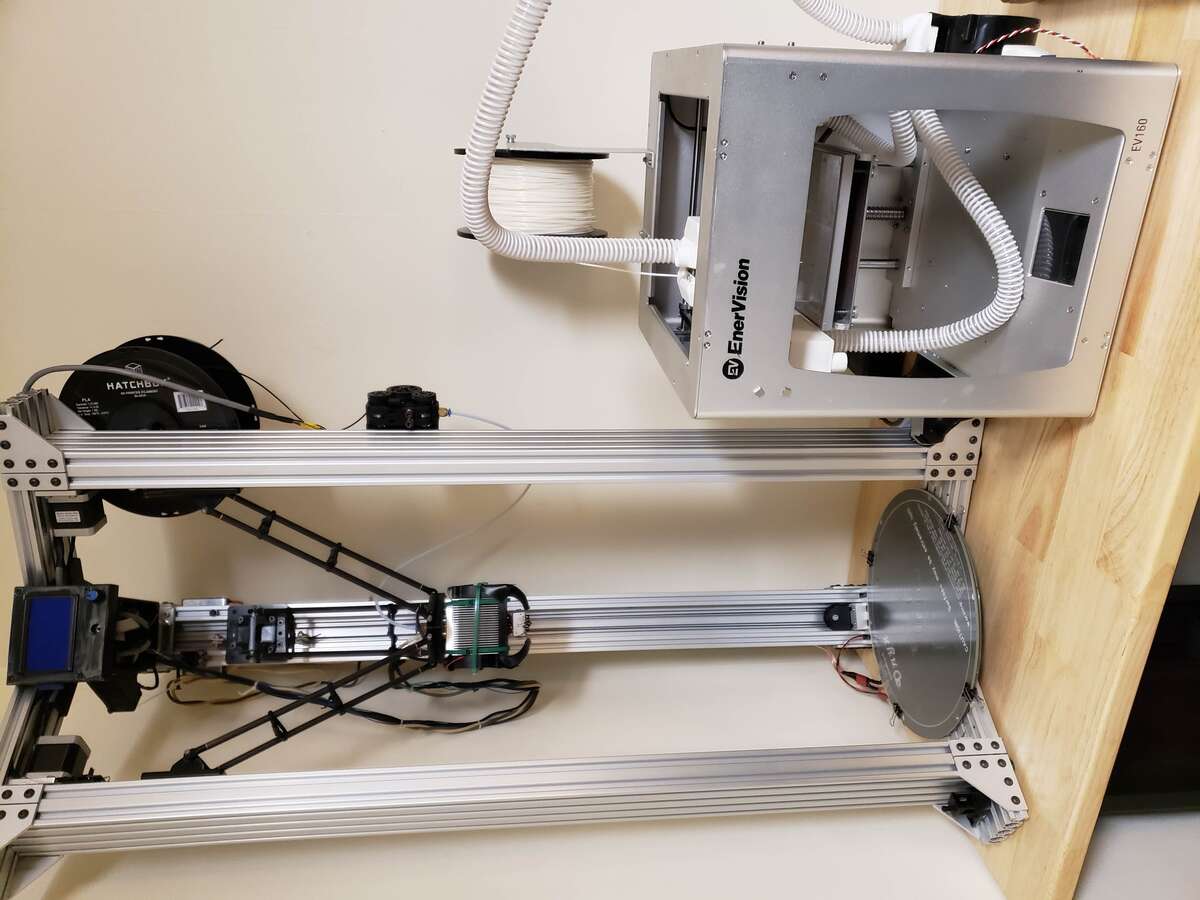
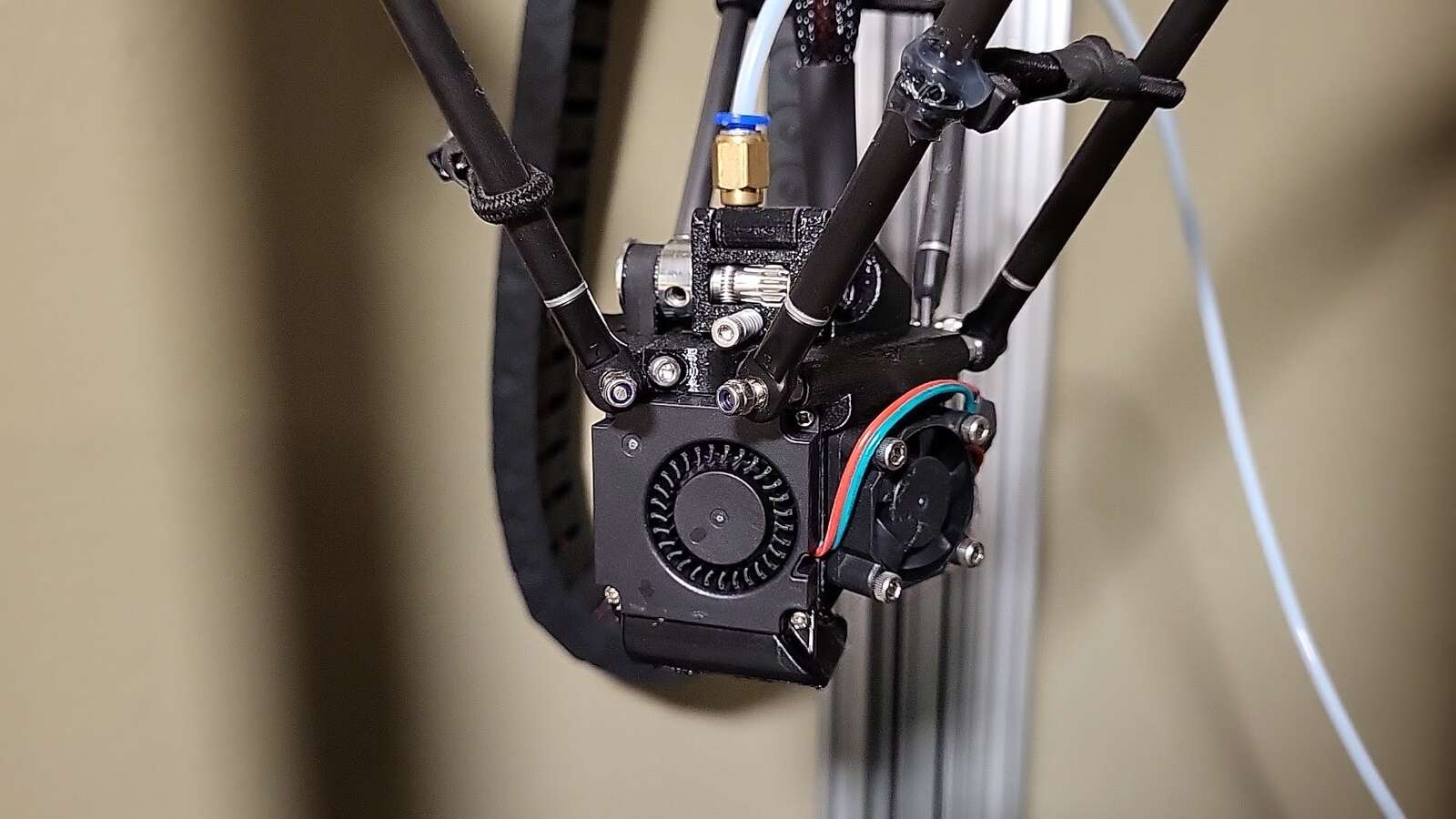
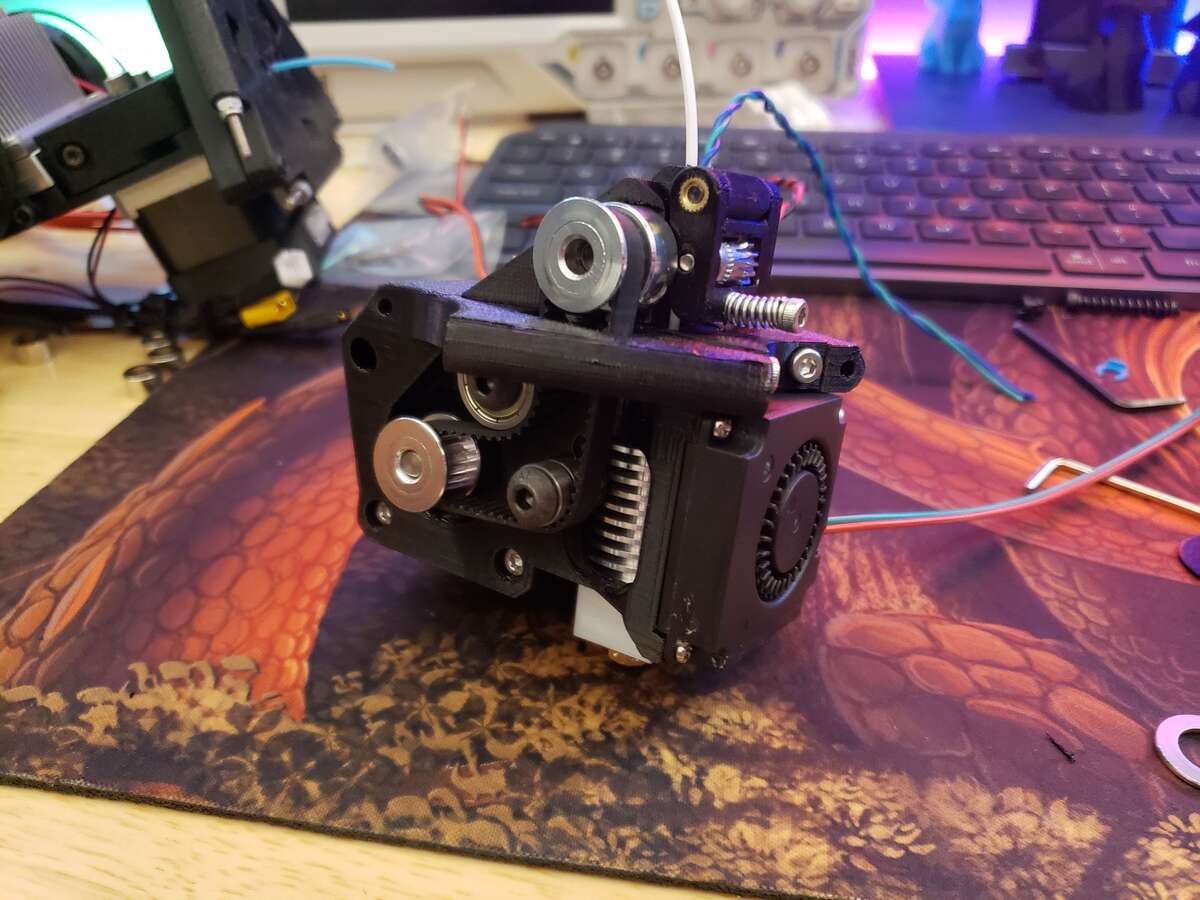


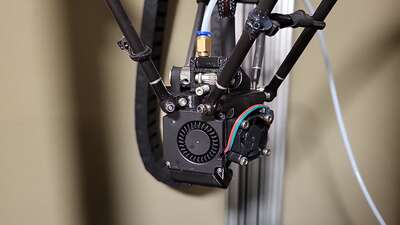





This project started in the era of the Prusa Mendel/i3 designs. Required faster print times than available 3D printers in the market, designed and built this system to solve that problem. Features:
|
|
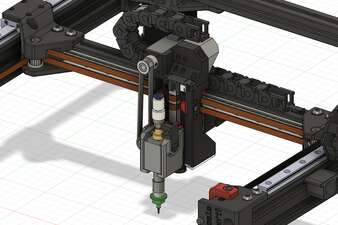
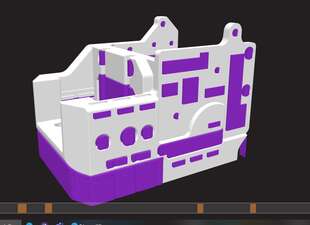
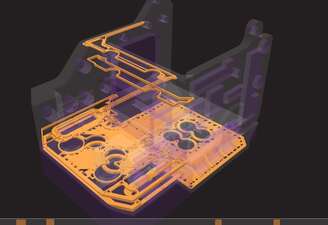
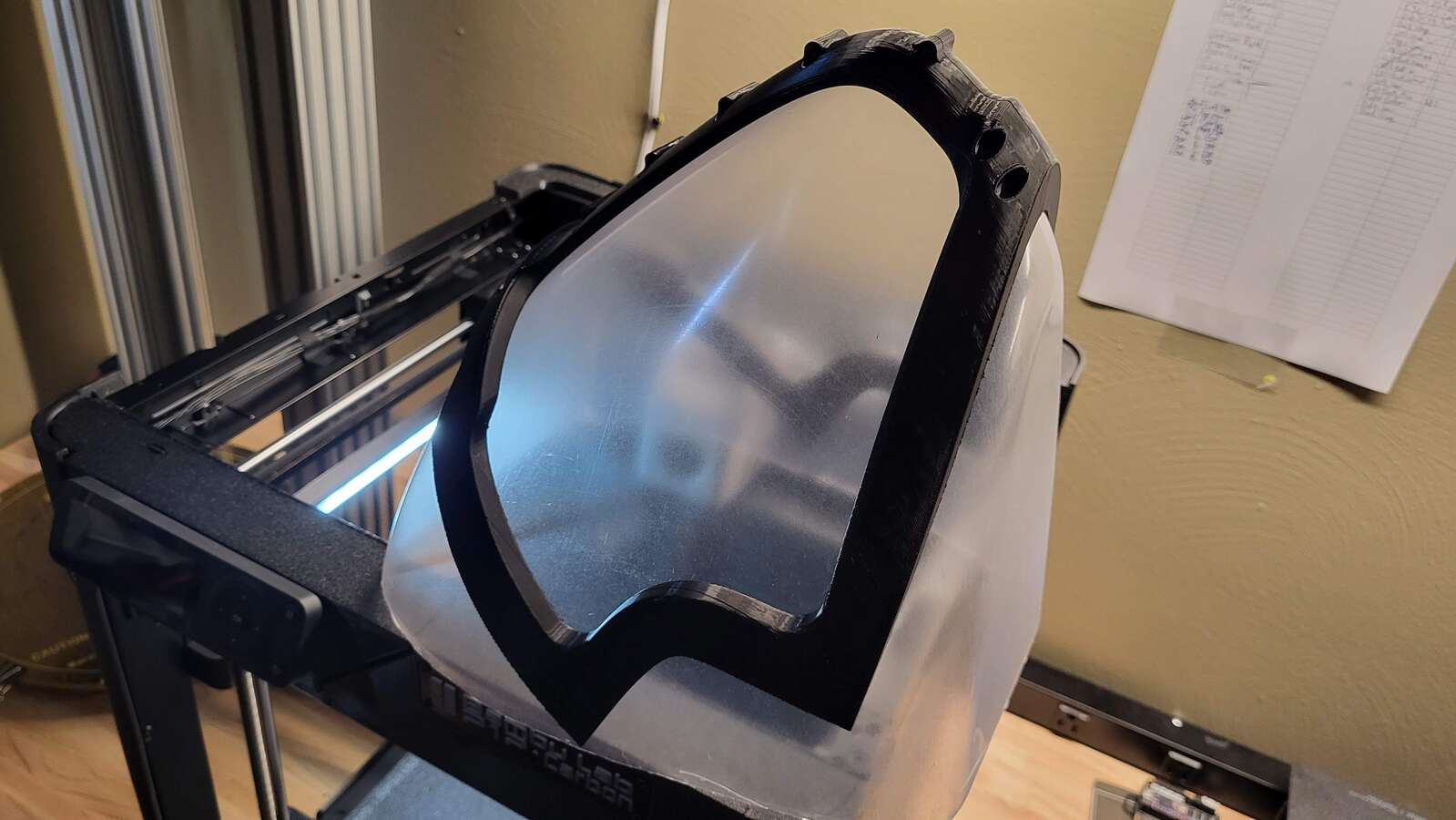
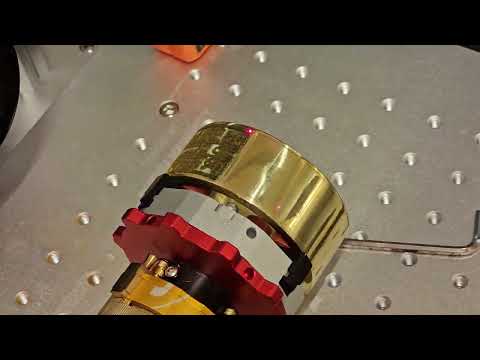
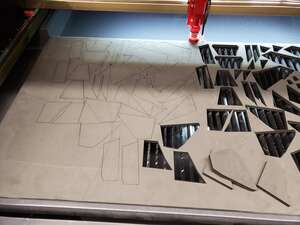
▸ Custom 4-Axis Machines and Fusion 360 Post Processors
| Github | Solo Project | 2023 - 2024 |




This project primarily is a custom-built Fusion 360 post-processor for multi-axis laser cutting and engraving. It was created to cut complex shapes into vacuum-formed plastic visors. The software is a Fusion 360 post-processor that uses the machine’s hardware configuration to convert 4-axis toolpaths into G-code for a custom 4-axis laser cutter. The machine is an XYZ motion system with an additional large rotary axis that has an integrated fume exhaust system. |
||
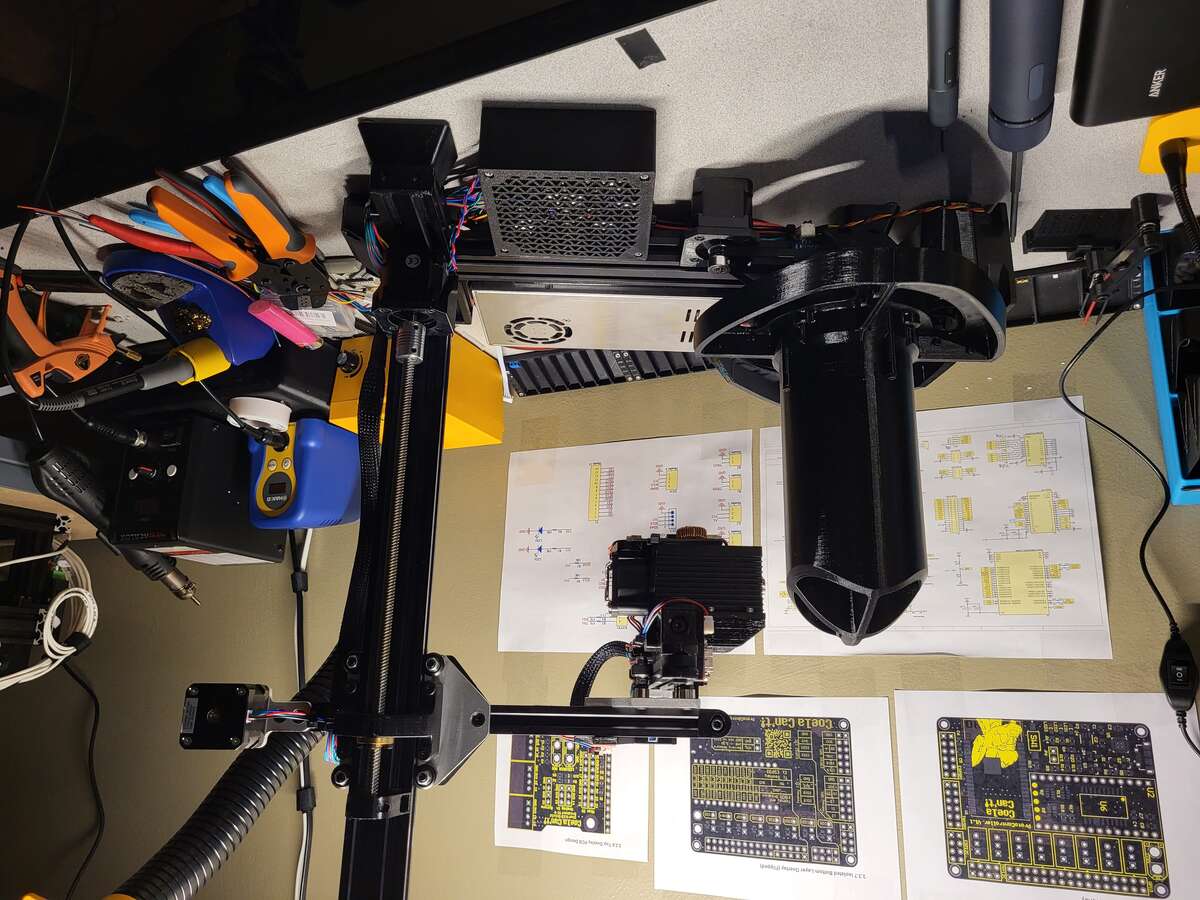
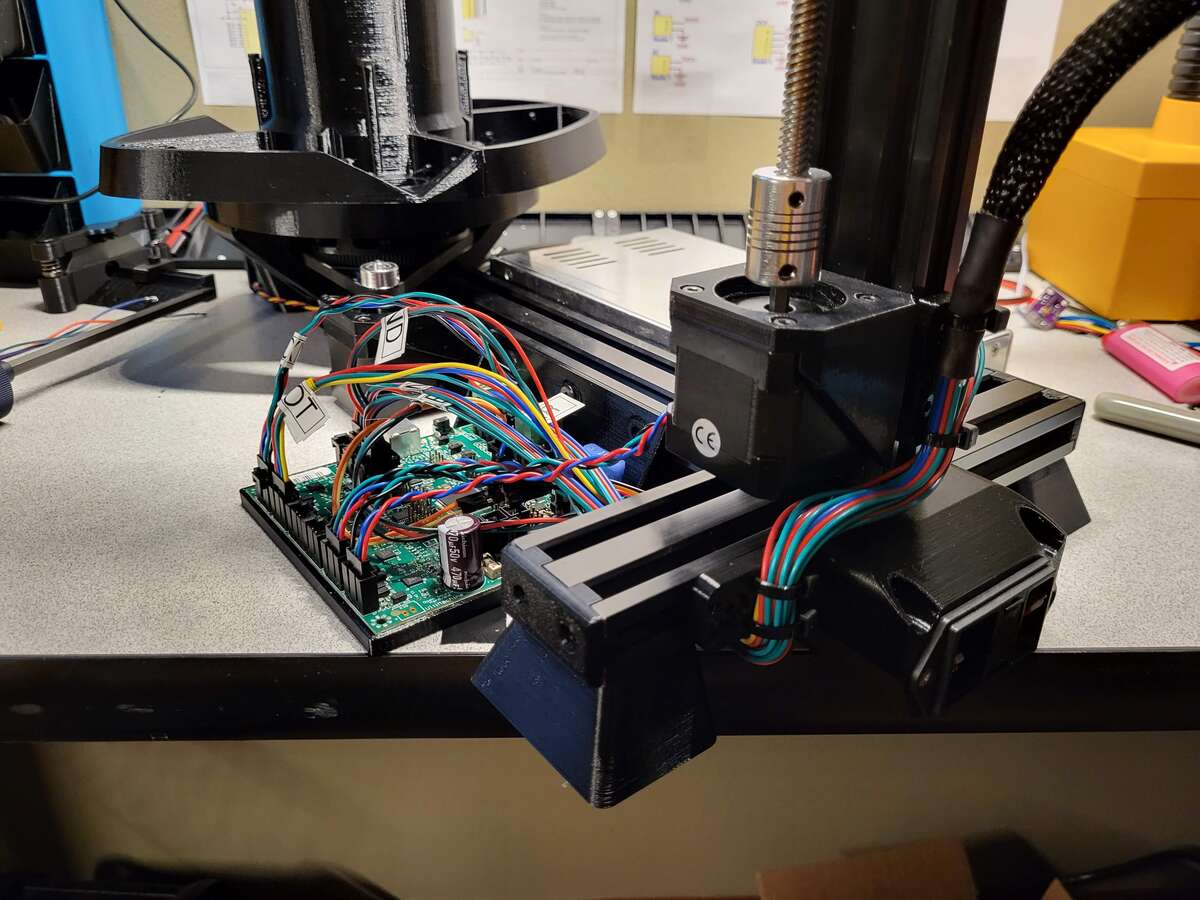
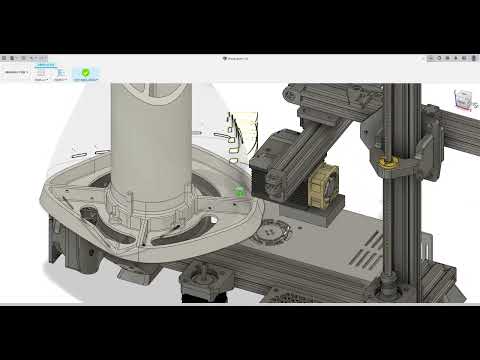
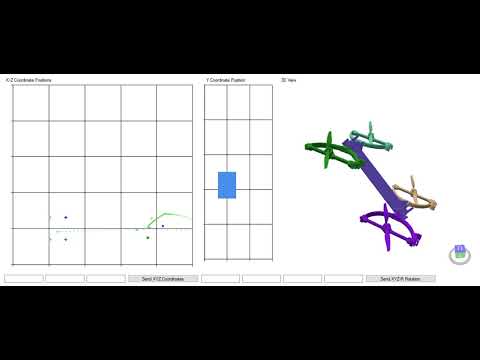
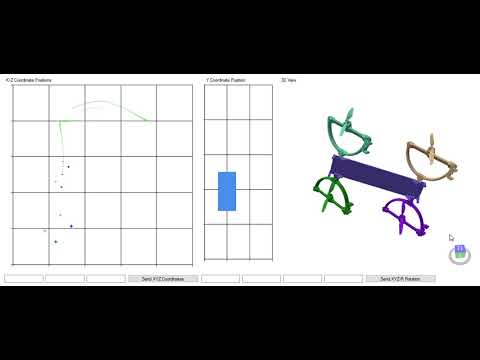
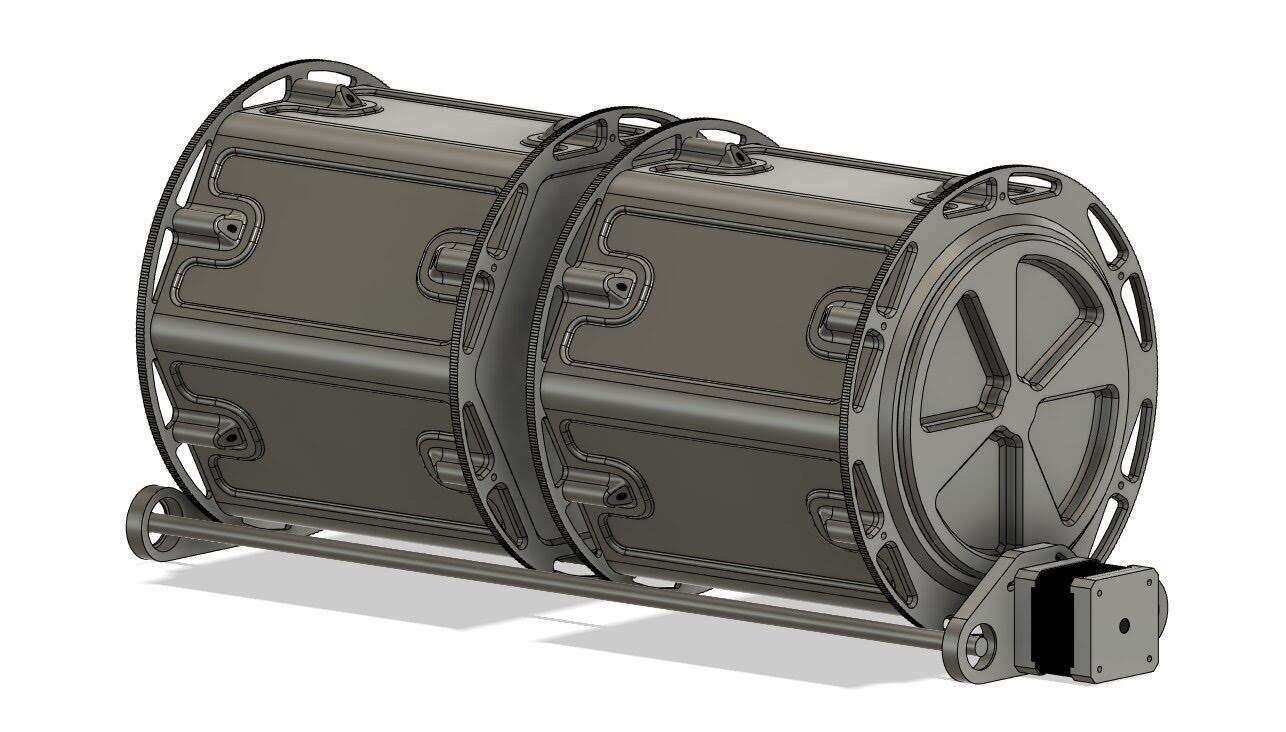
▸ 4-Axis Automated Gimbal for MEMS-Based Motion Processor Testing
| Github | Solo Project | 2018 - 2020 |
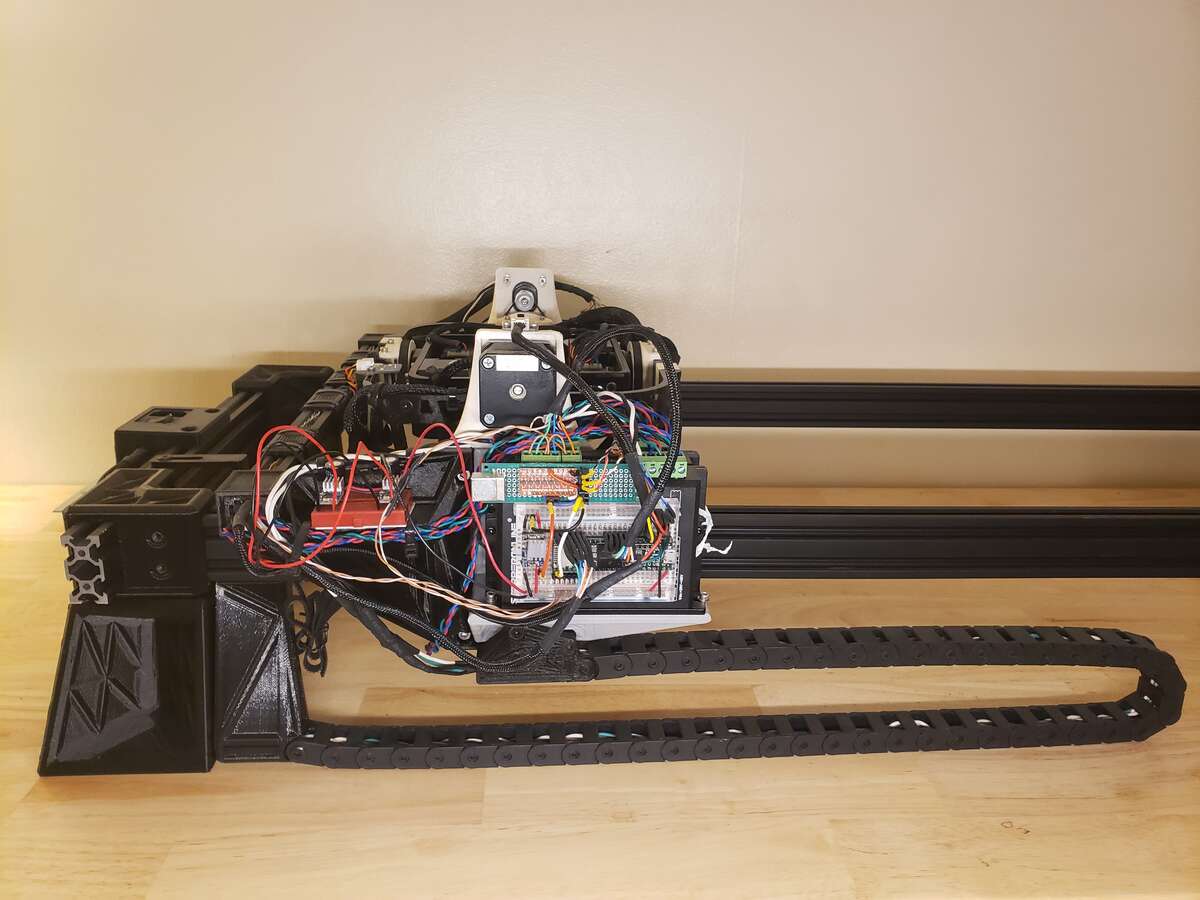
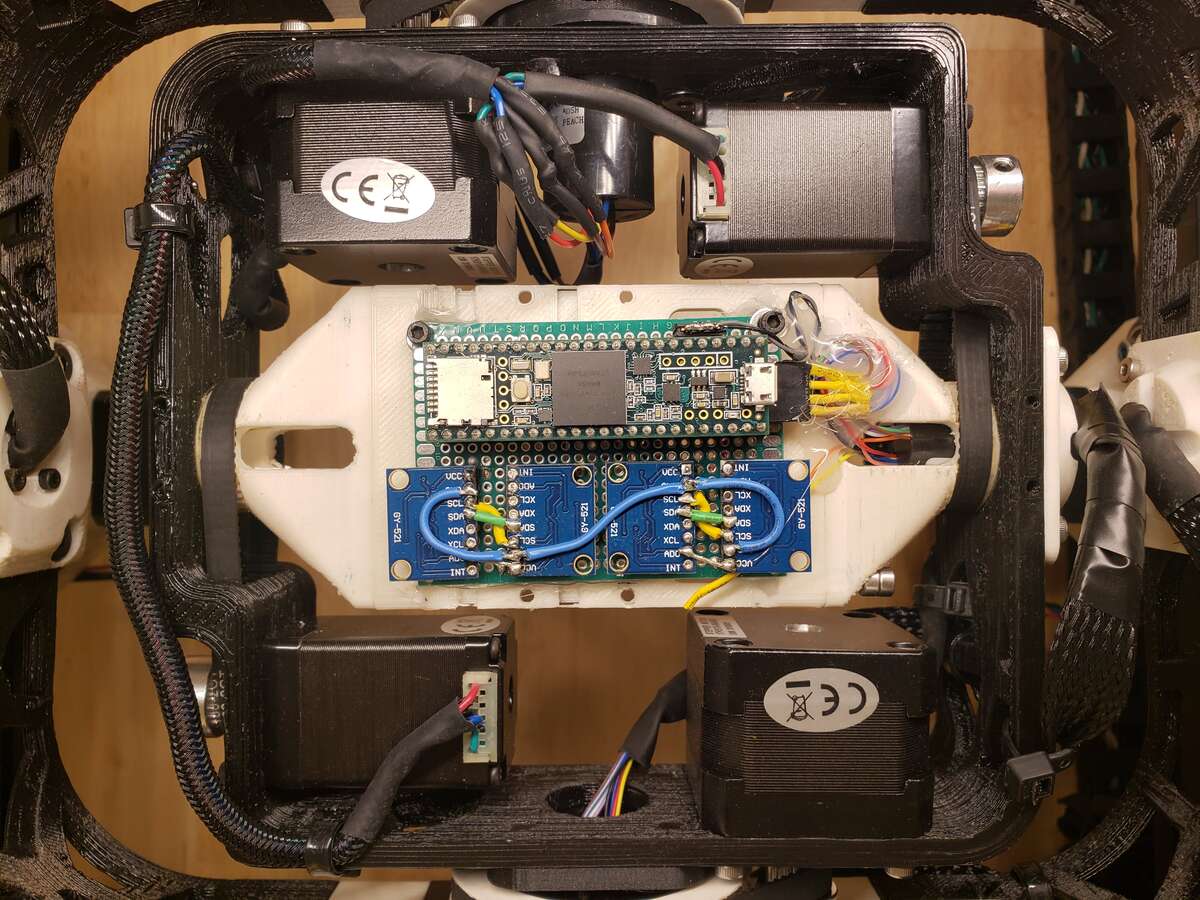
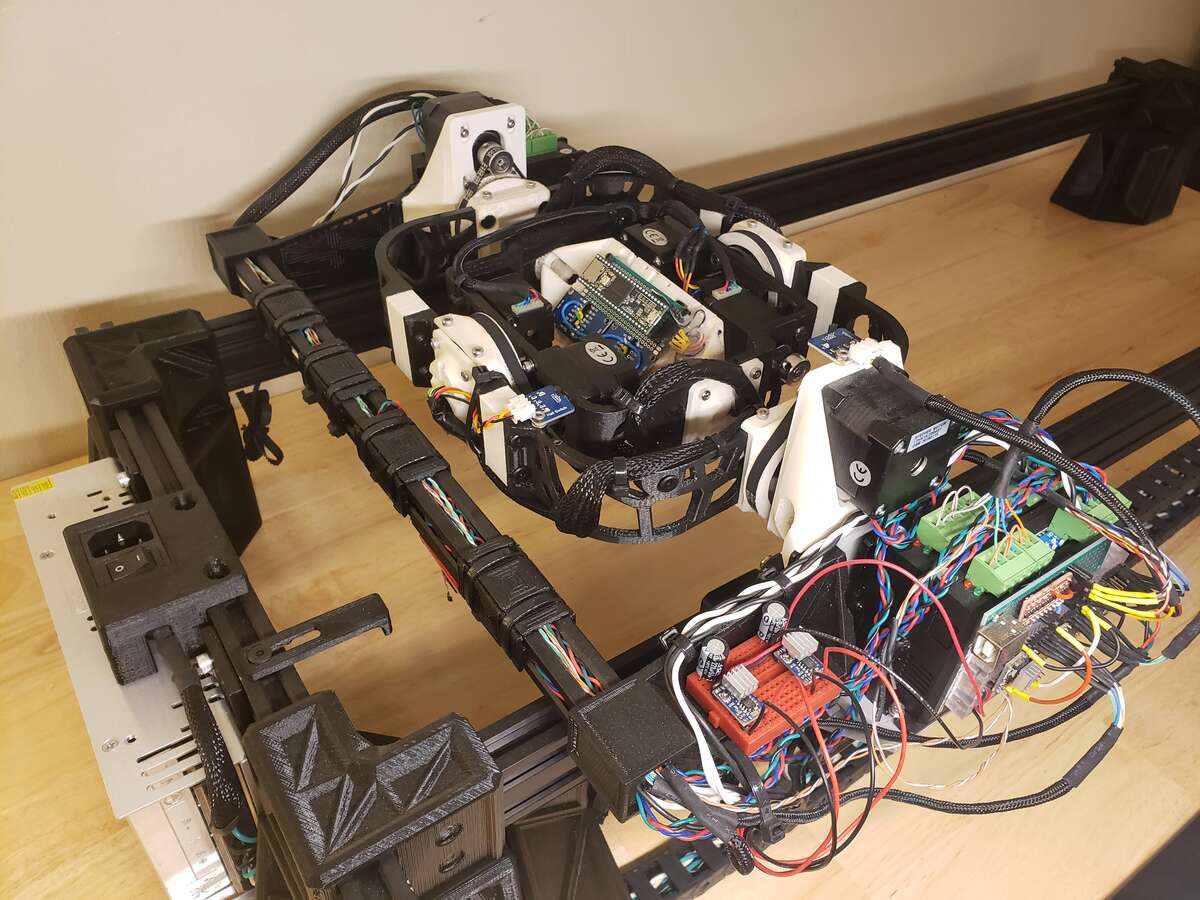
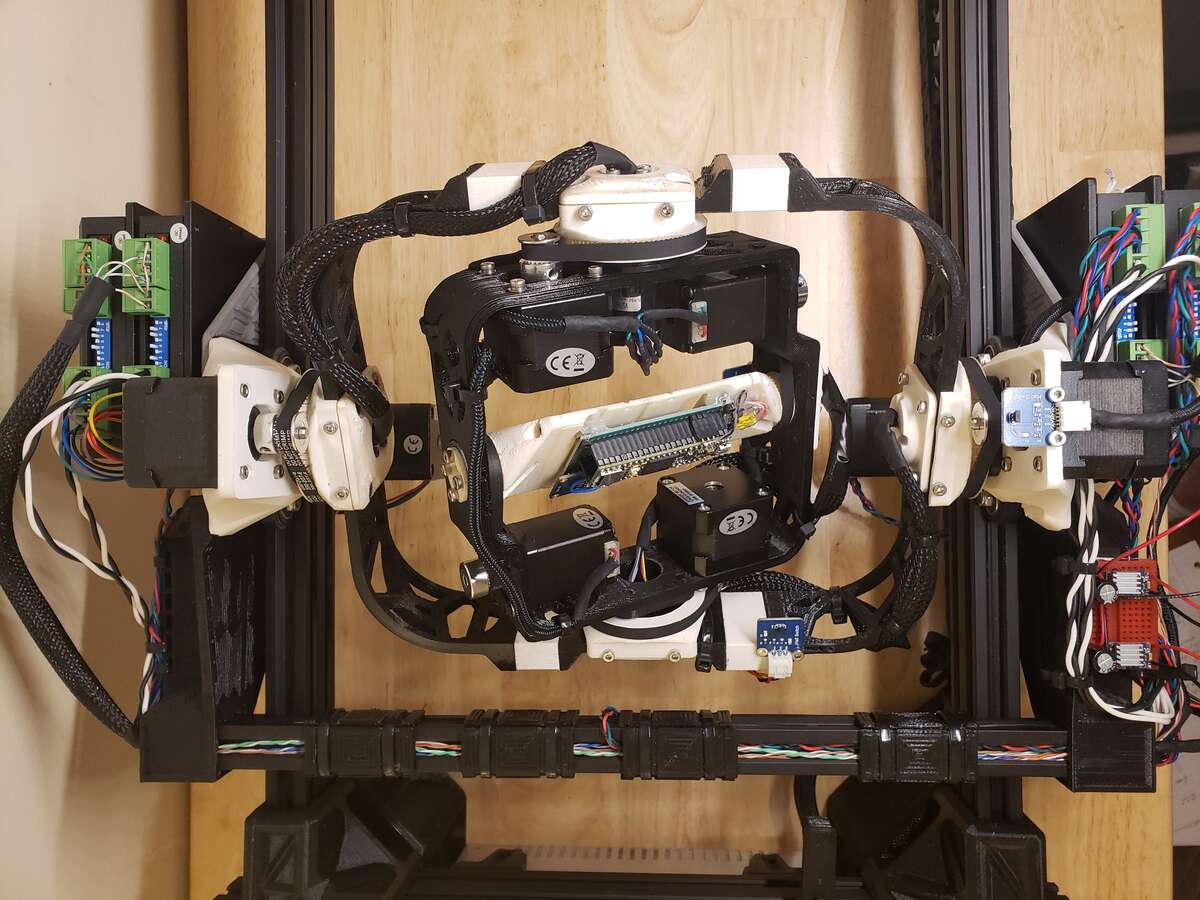

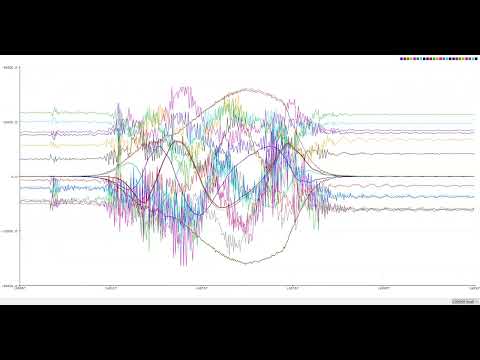

The 4-axis gimbal is the primary tool in a larger project. This project required accurate calibration of low-cost MPU6050 motion sensors. To perform the calibration a custom 4-axis motion system (3 rotational axes and 1 linear axis) closely follows a path while capturing the data (acceleration/angular velocity and for some also the magnetic field) from multiple inertial measurement units. A separate tool-the linked GitHub repository-simulates the system and generates ideal theoretical sensor outputs. Comparing real and simulated data is used to calibrate the system and develop filters for the sensors adjusted outputs. |
||
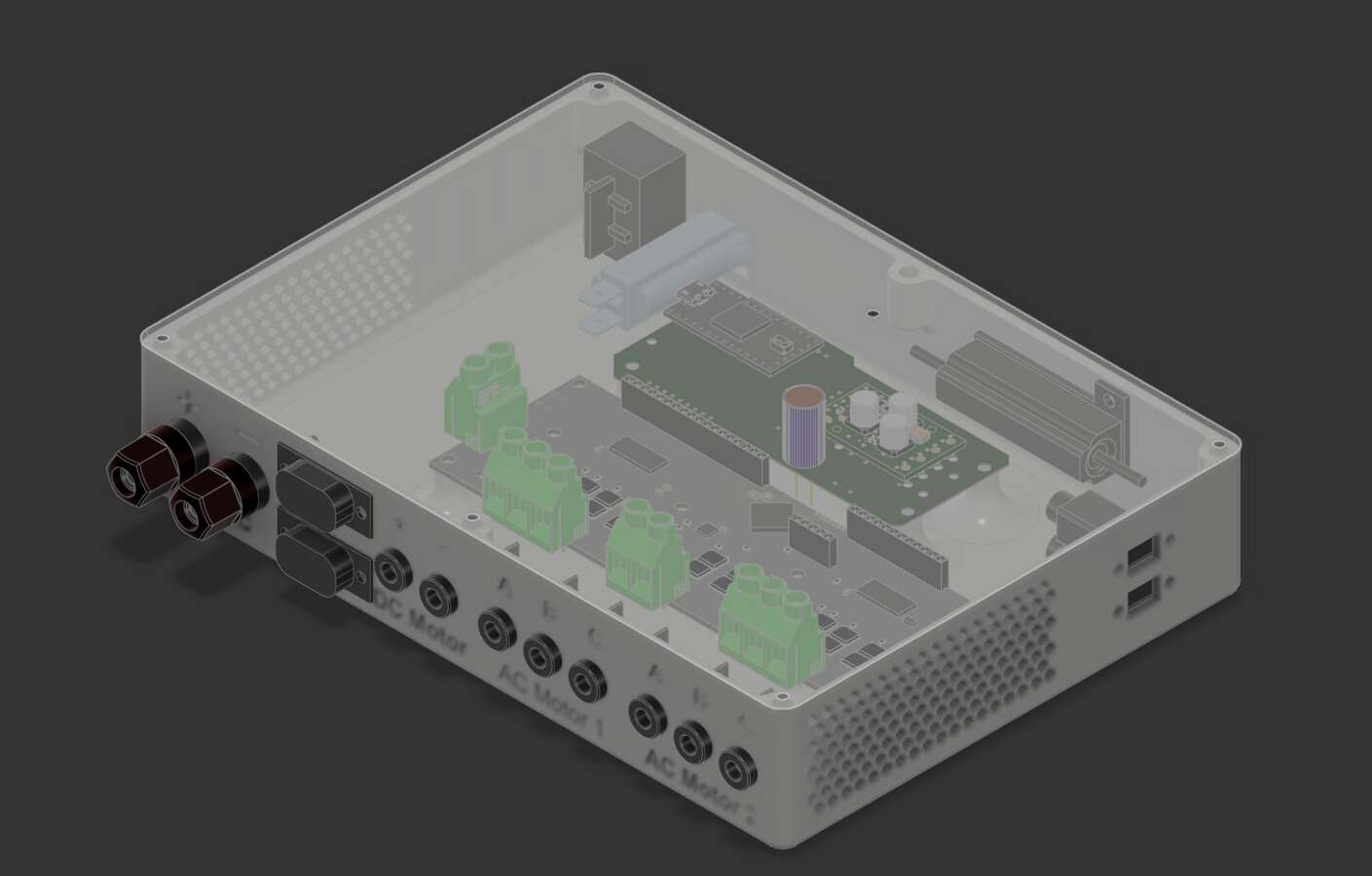
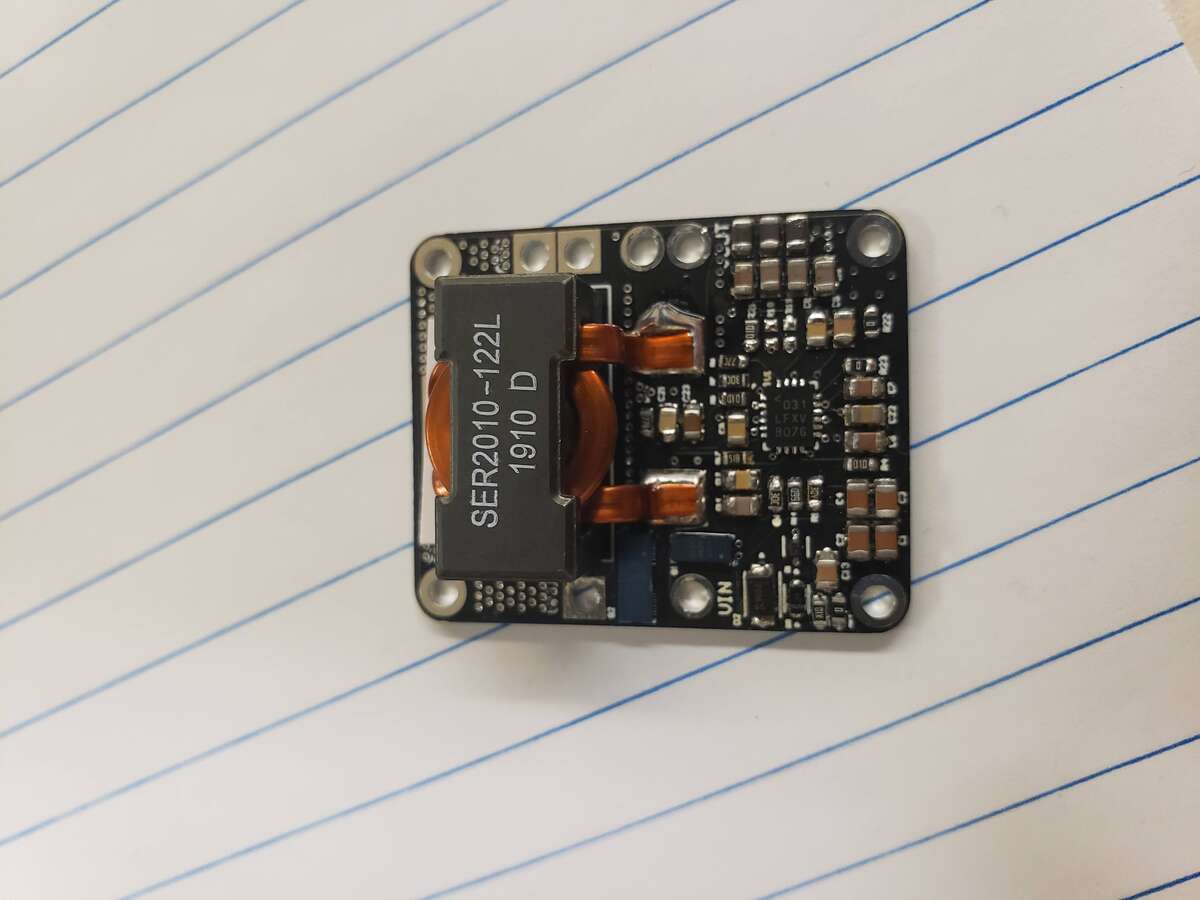
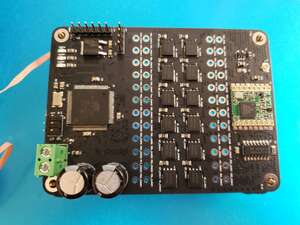
▸ Power Electronics and Control Systems
| Solo Projects | 2014 - Now |
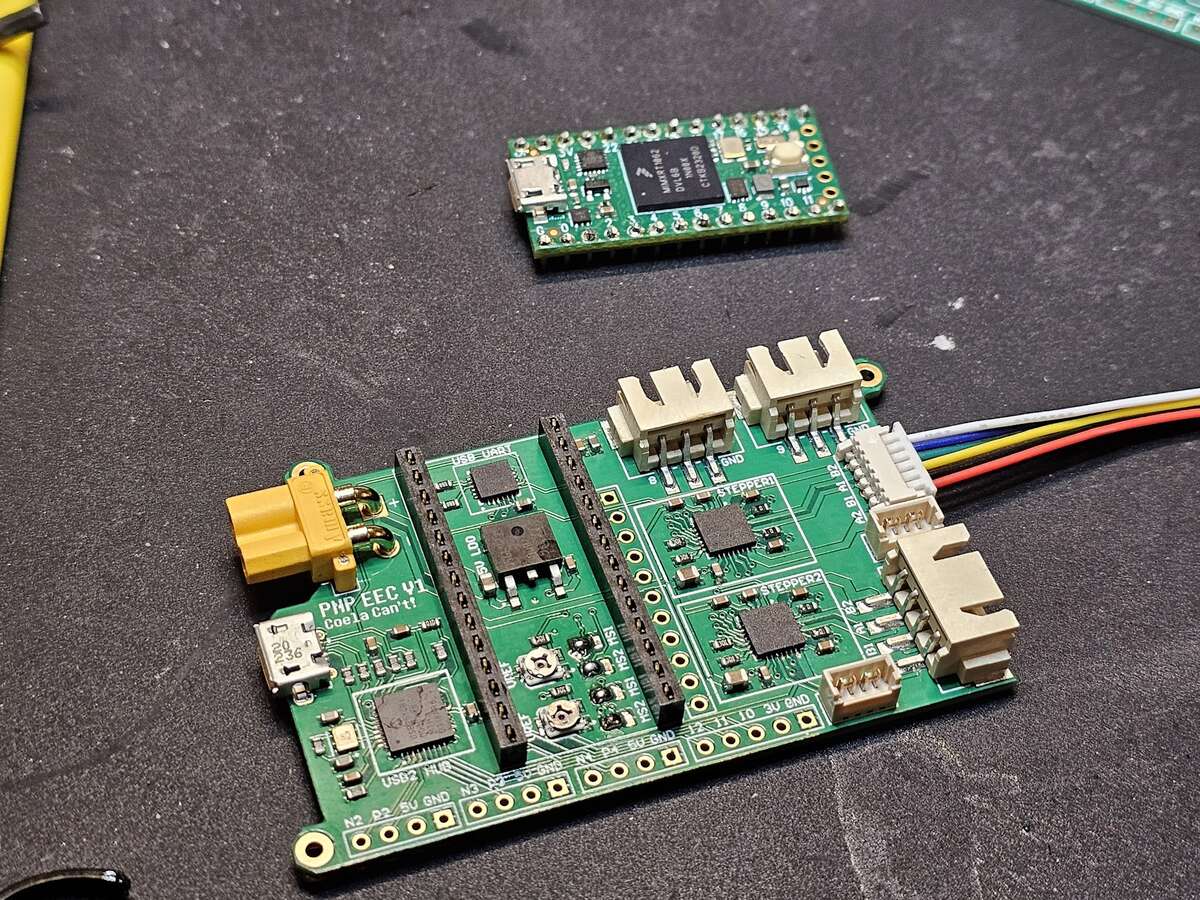
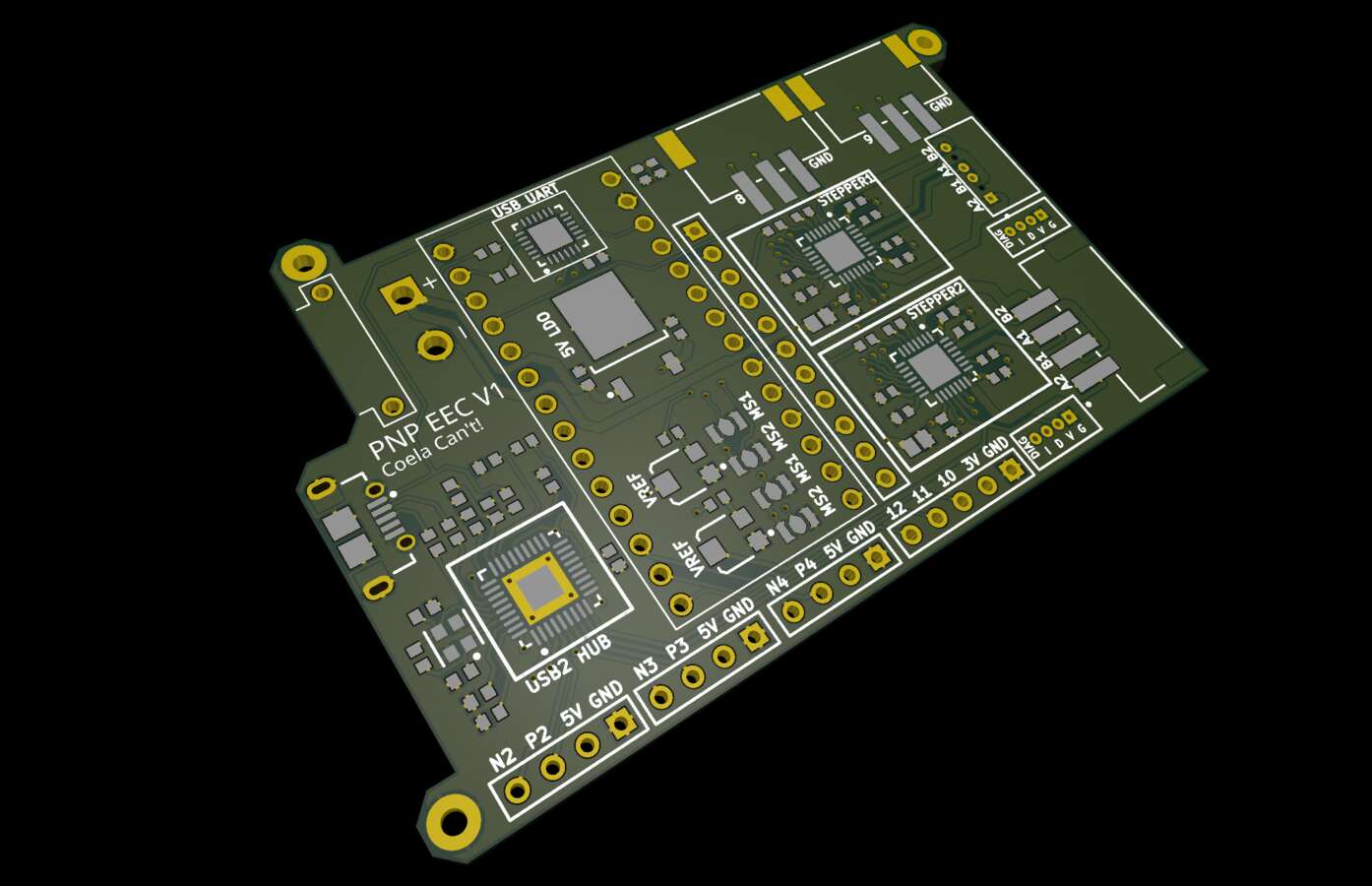

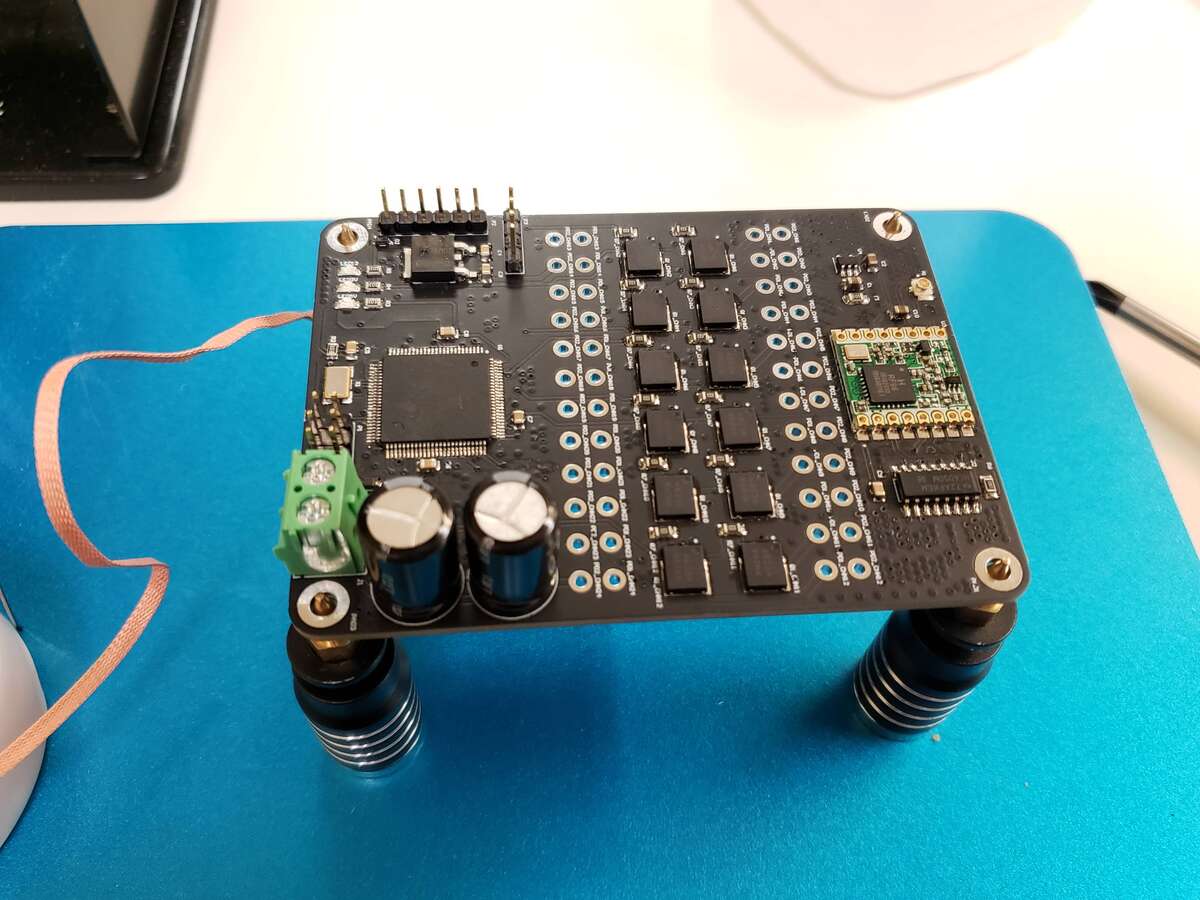













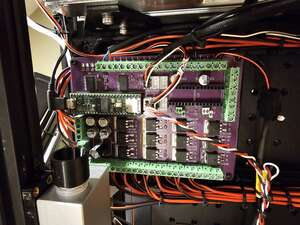
Designed and built custom power-conversion, motion‑control systems, and other electronics:
|
|
▸ Customized Voron CoreXY 3D Printer
| Solo Project | 2019 - 2021 |
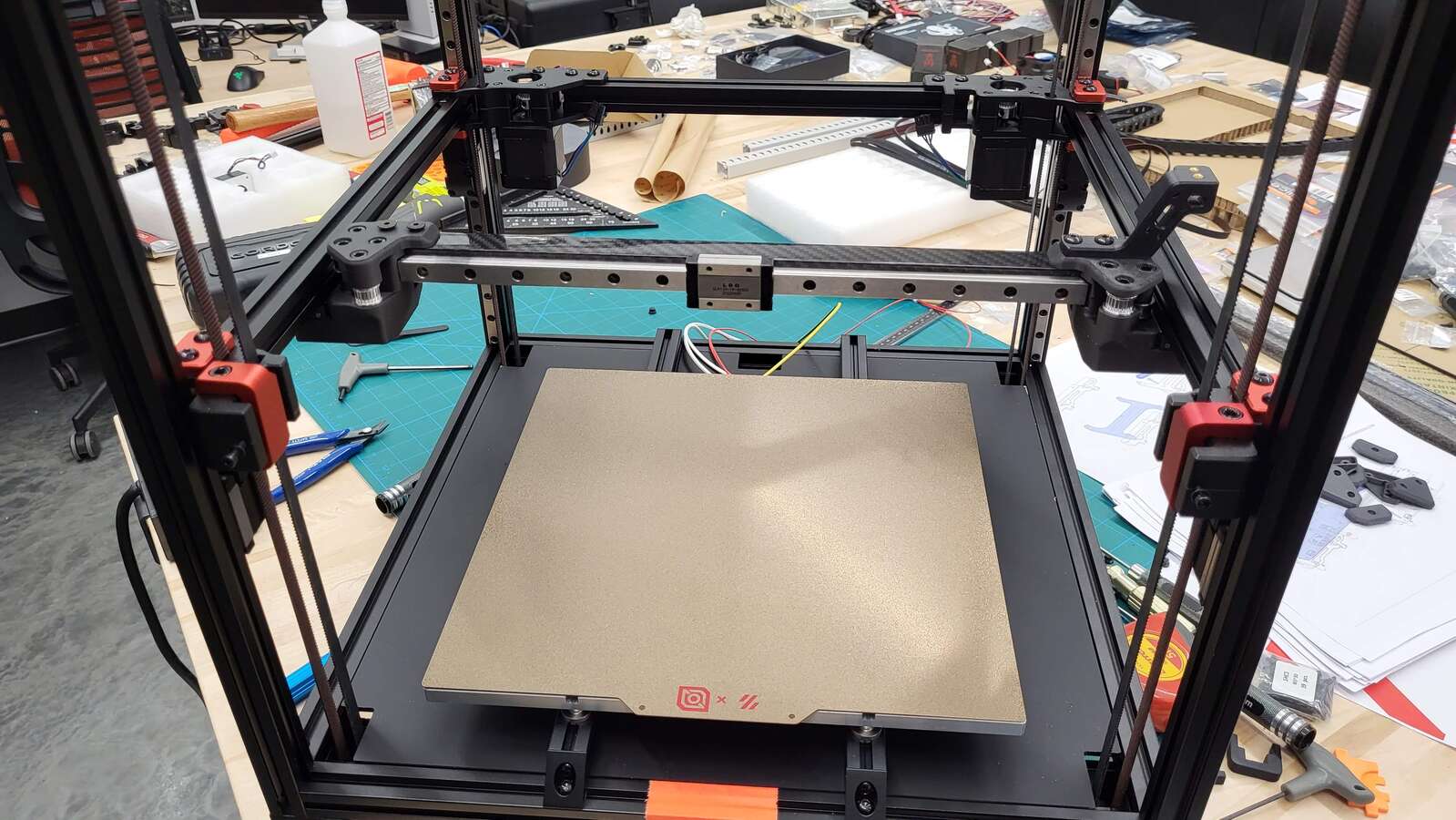


A custom 3D printer derived from the Voron project, built to explore the limits of FDM additive manufacturing.
|
|
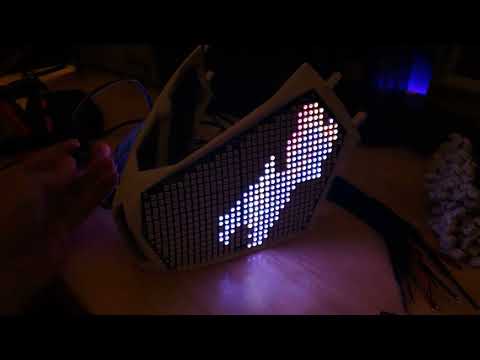
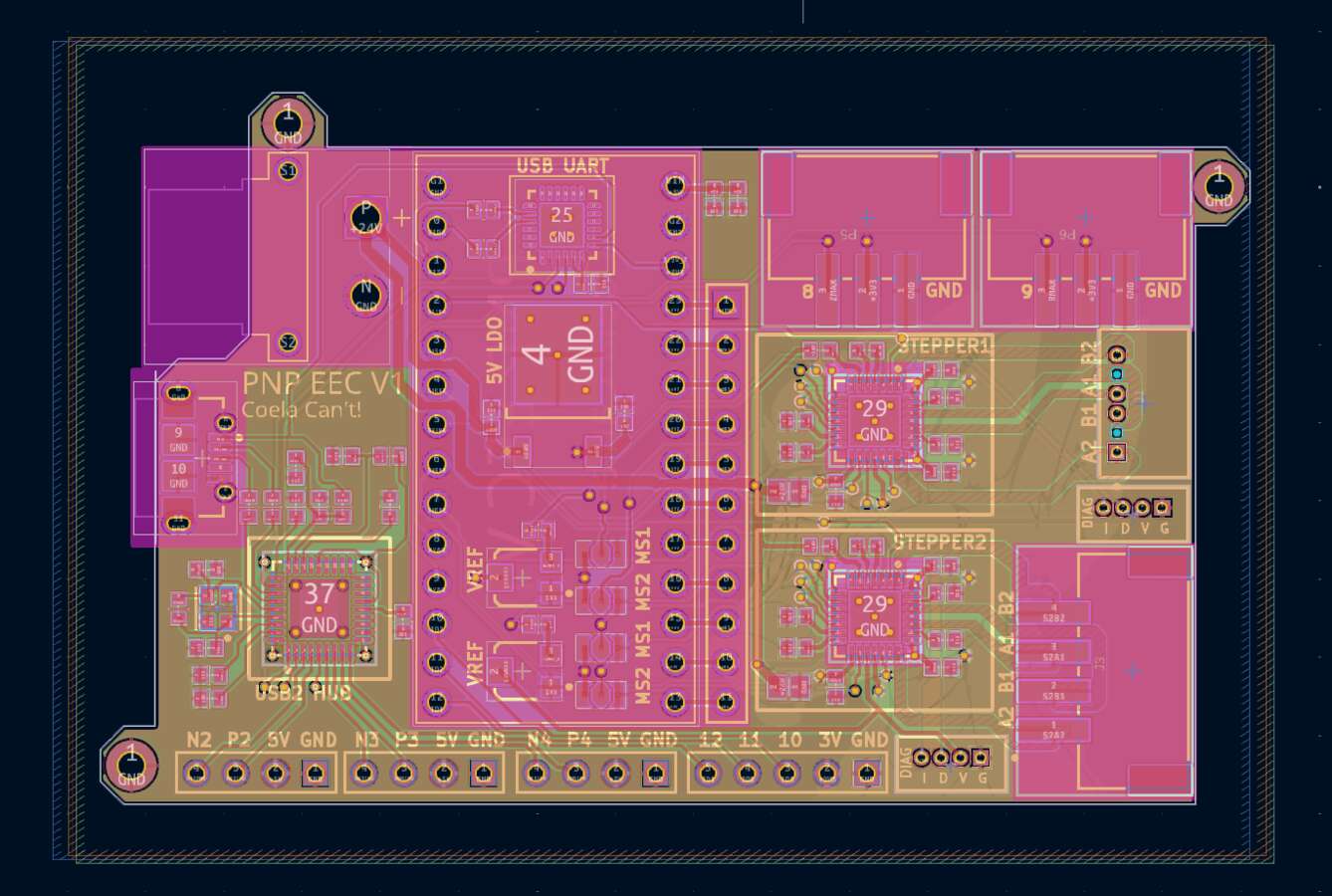
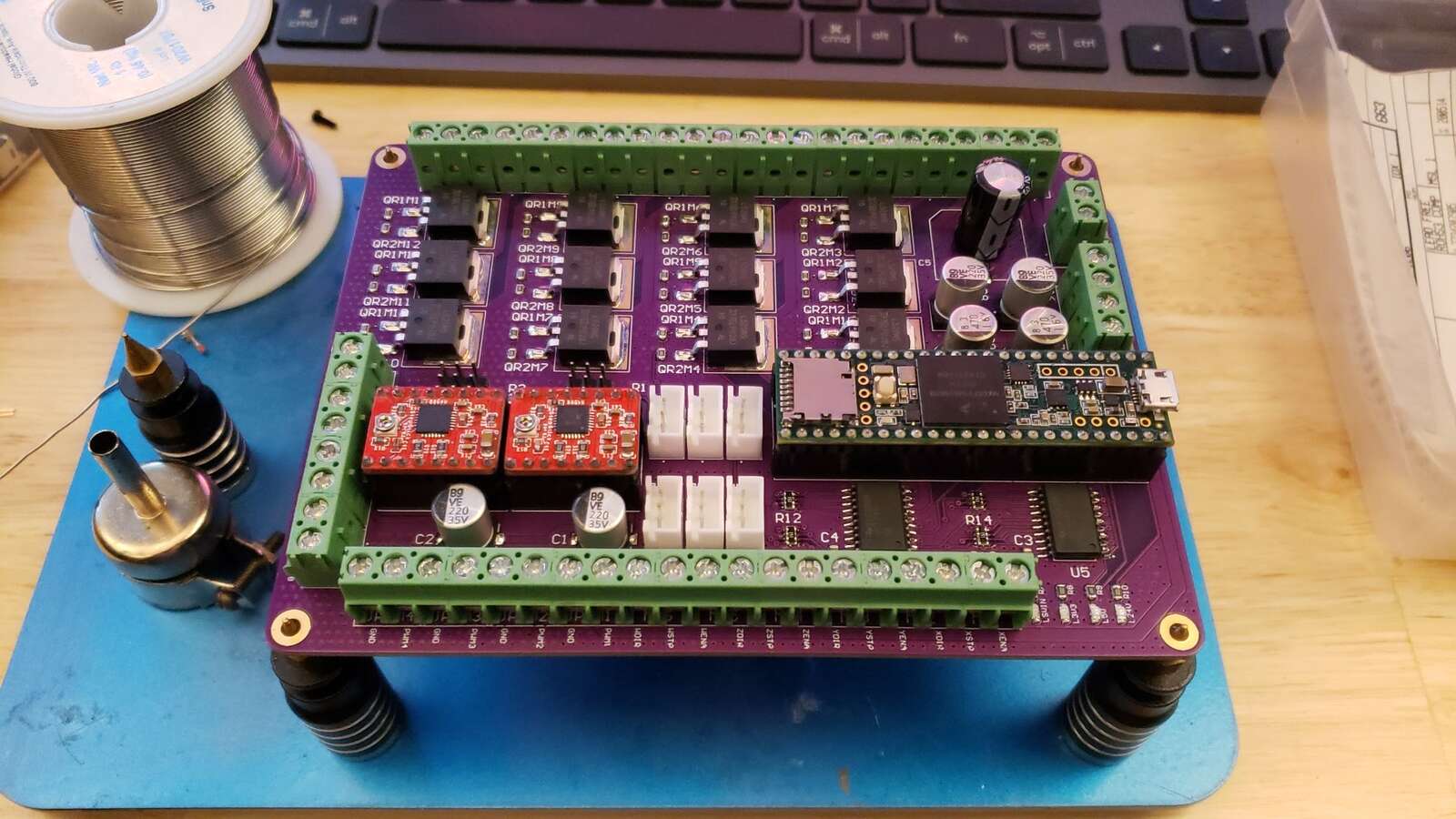
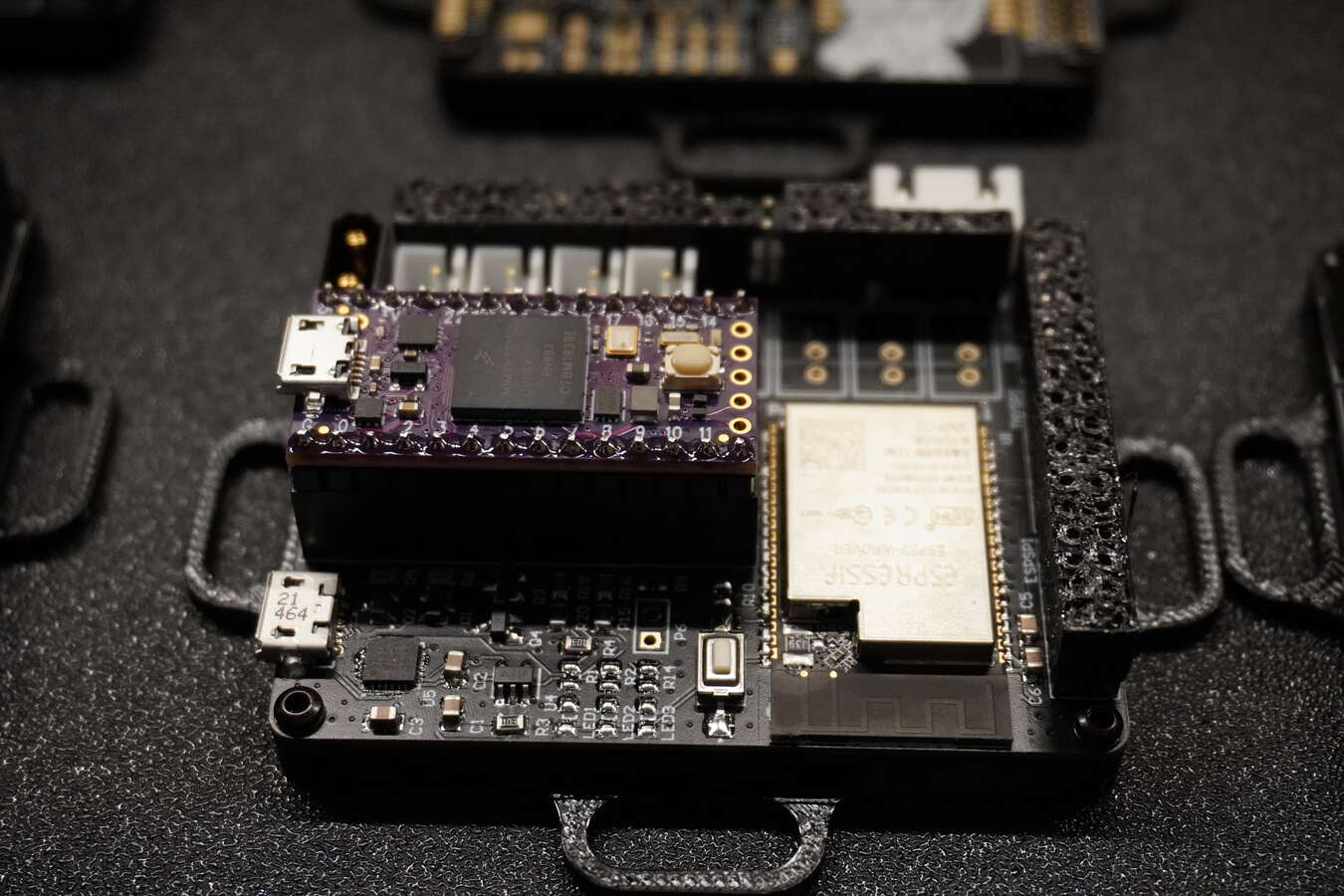
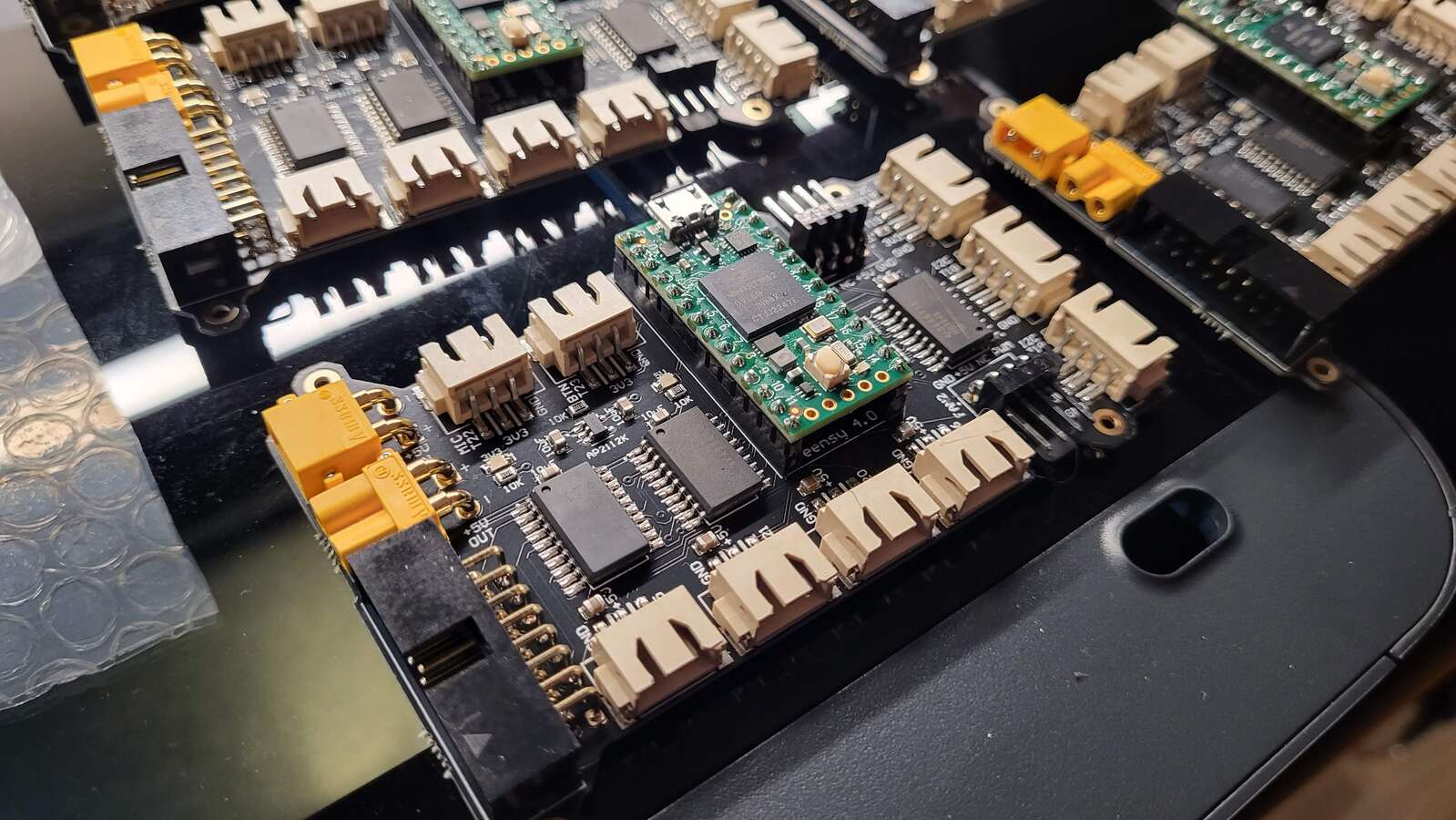
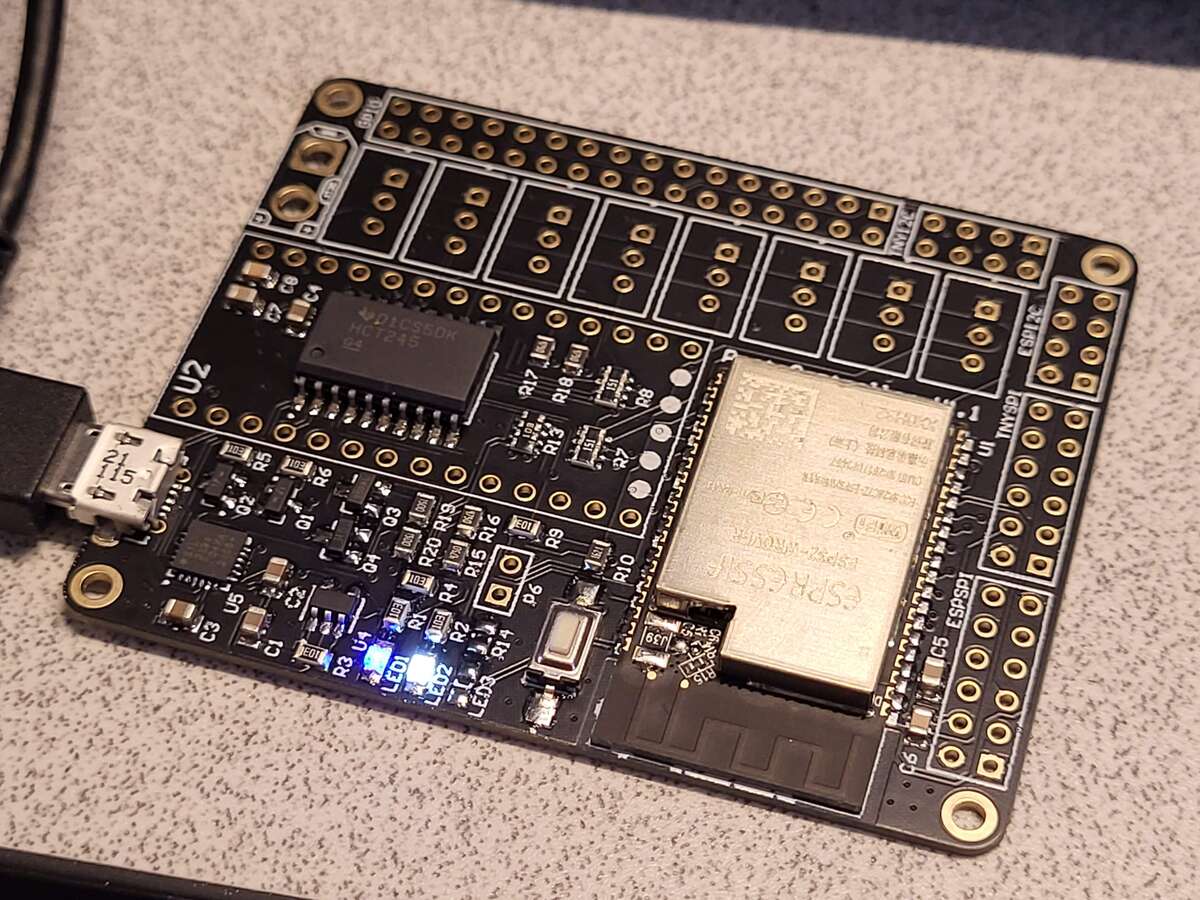
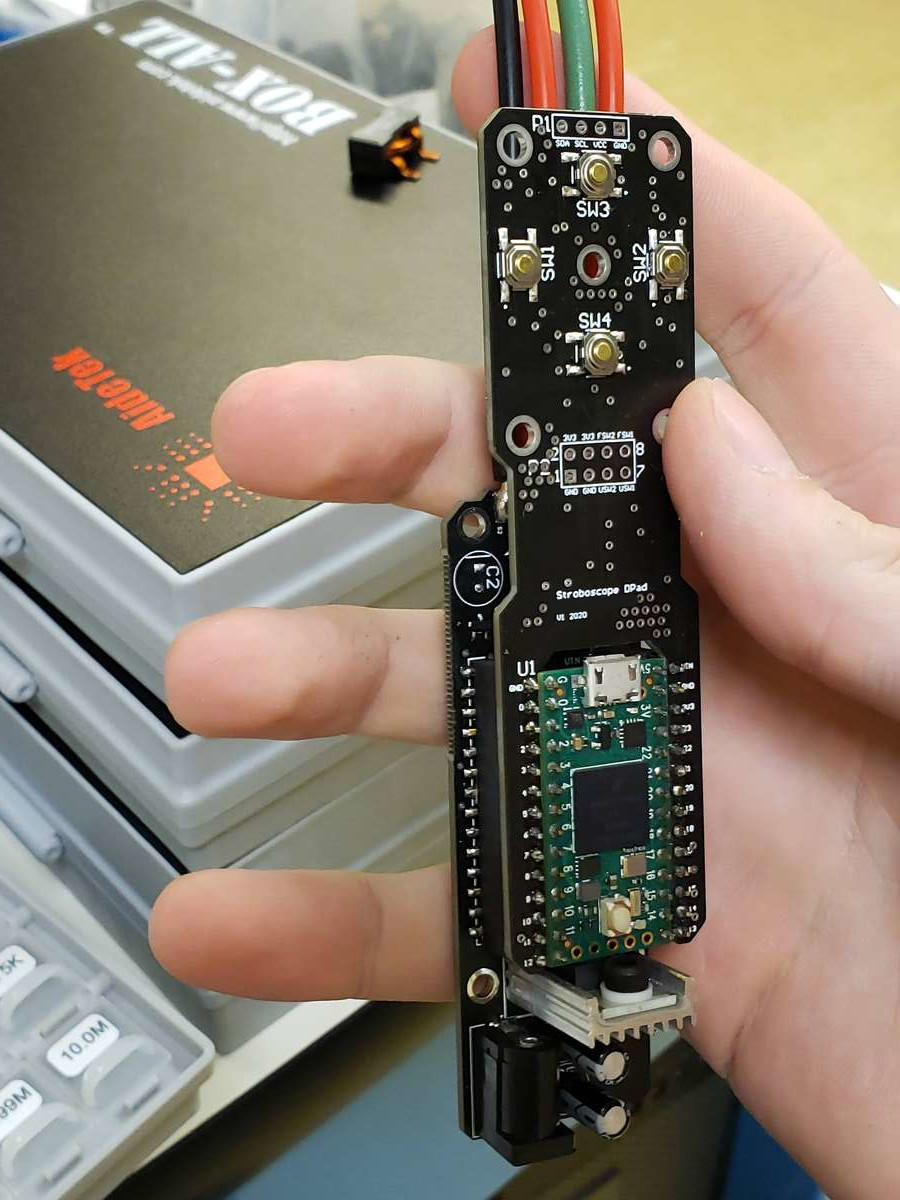
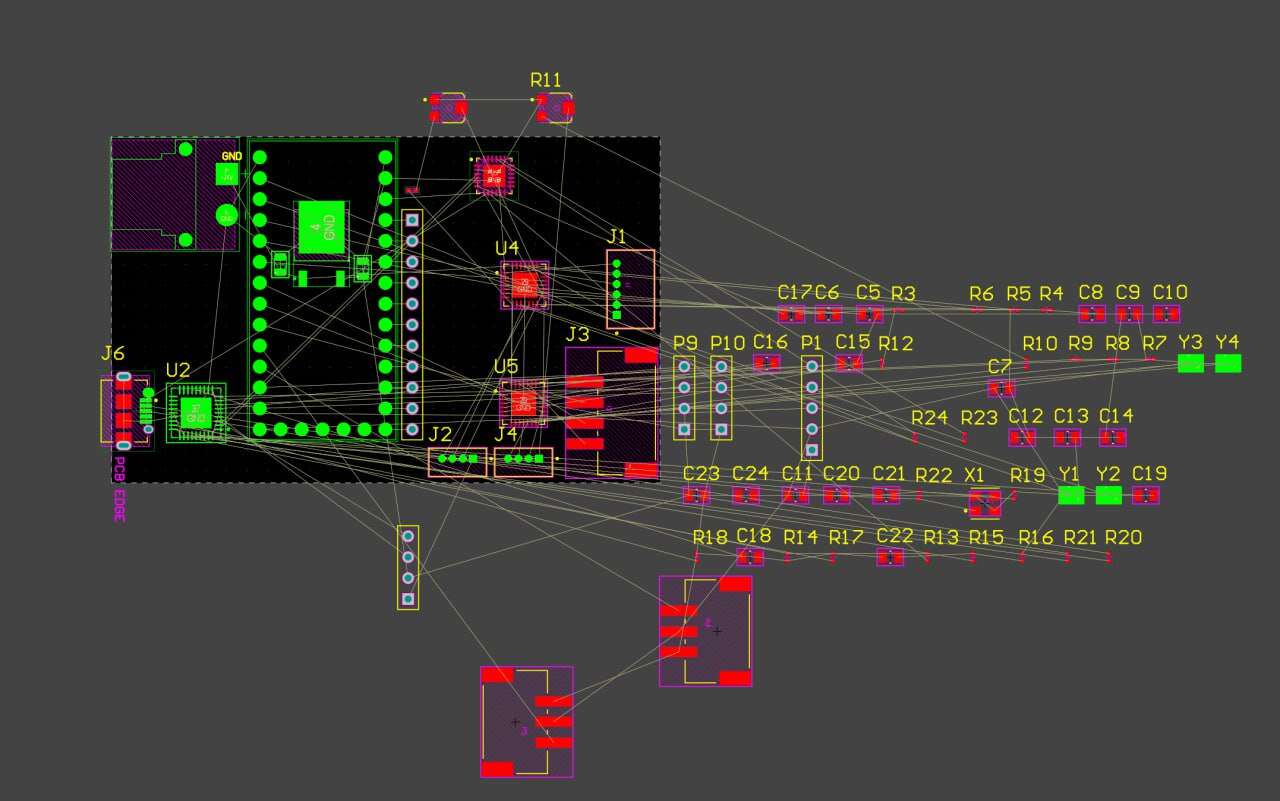
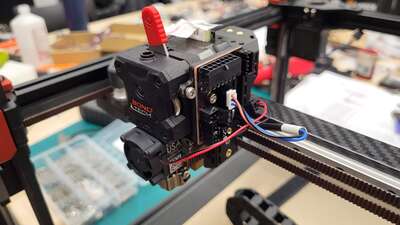
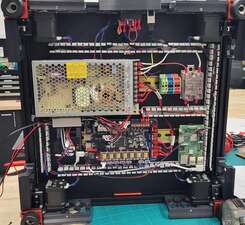
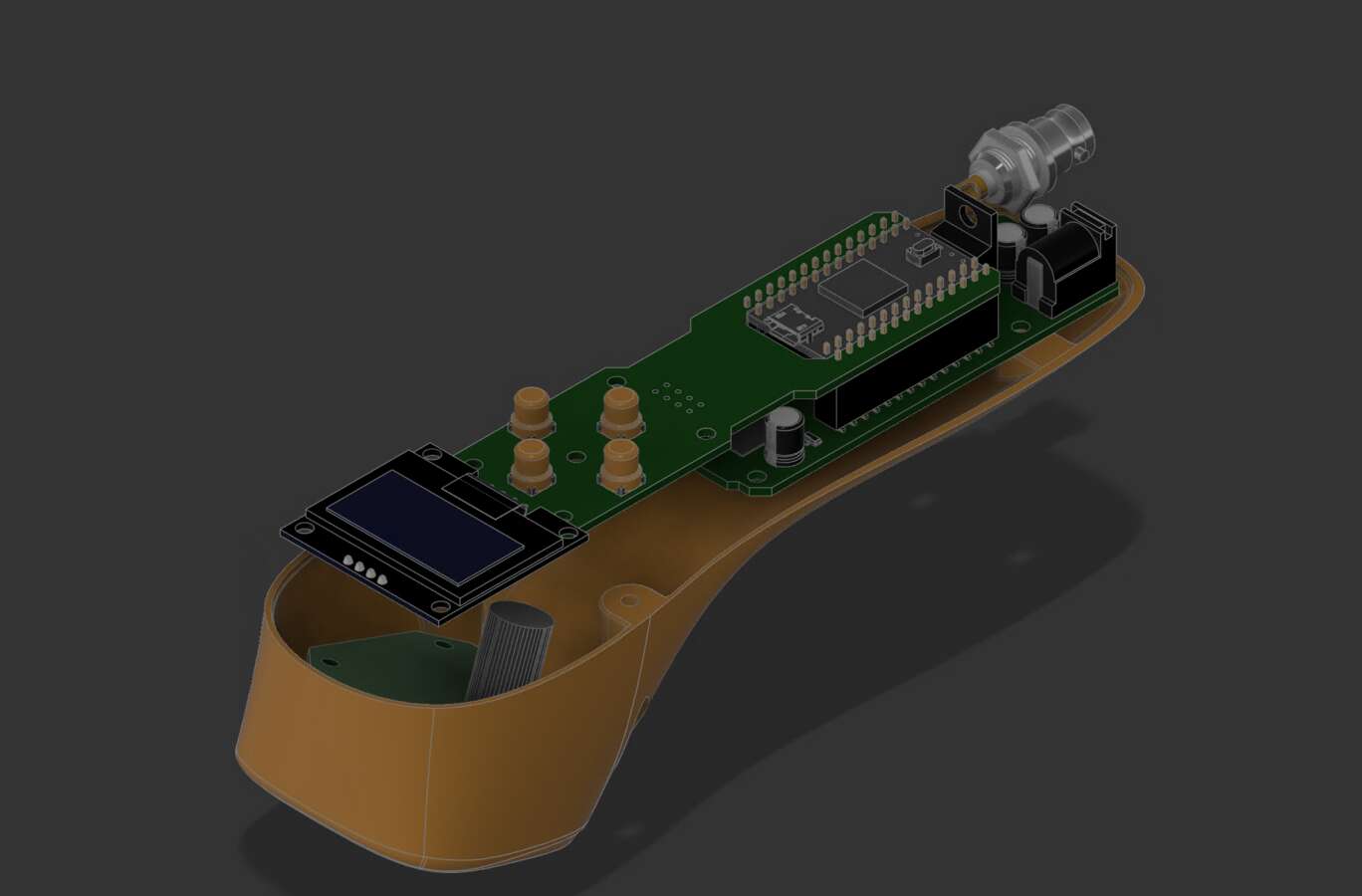
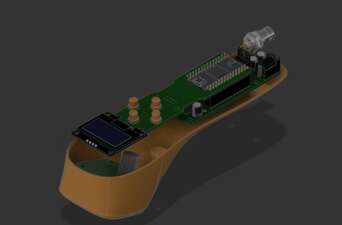
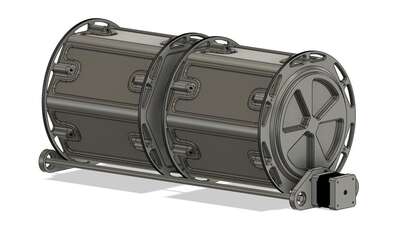
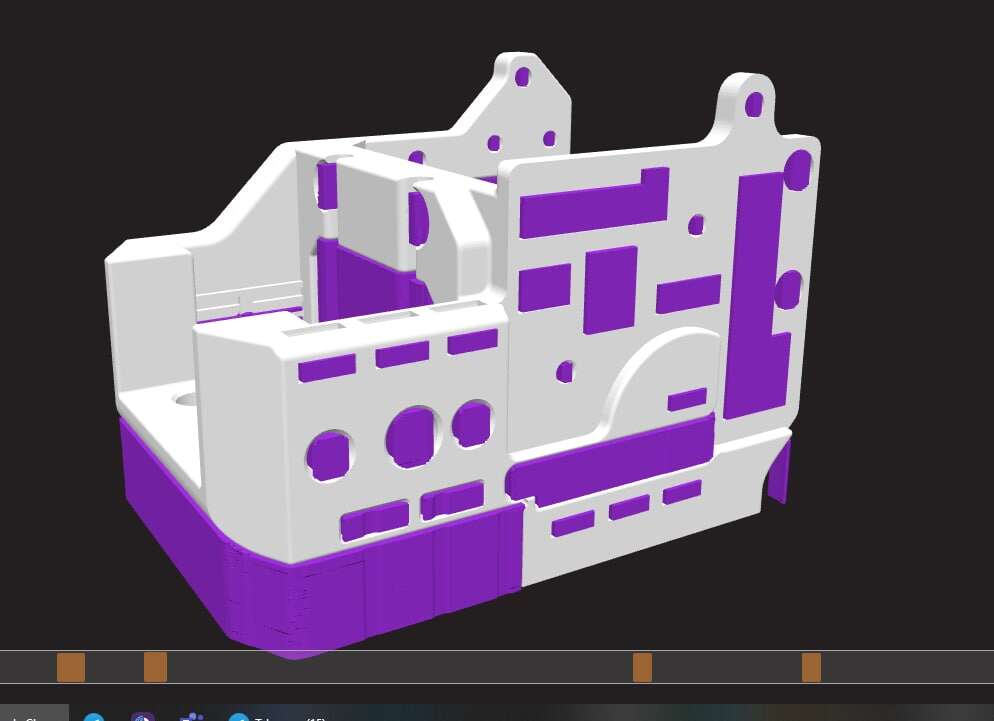
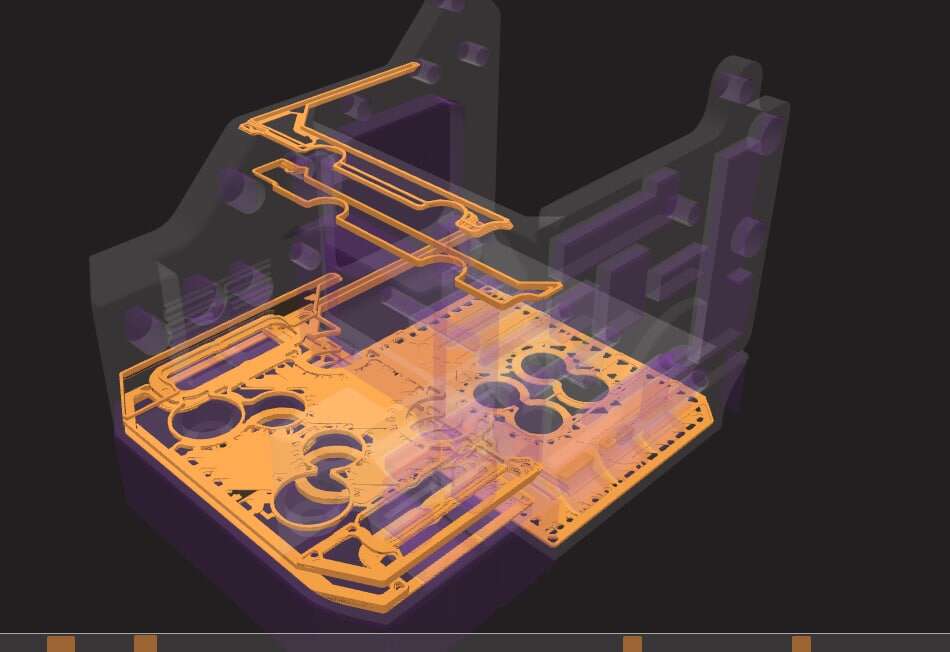
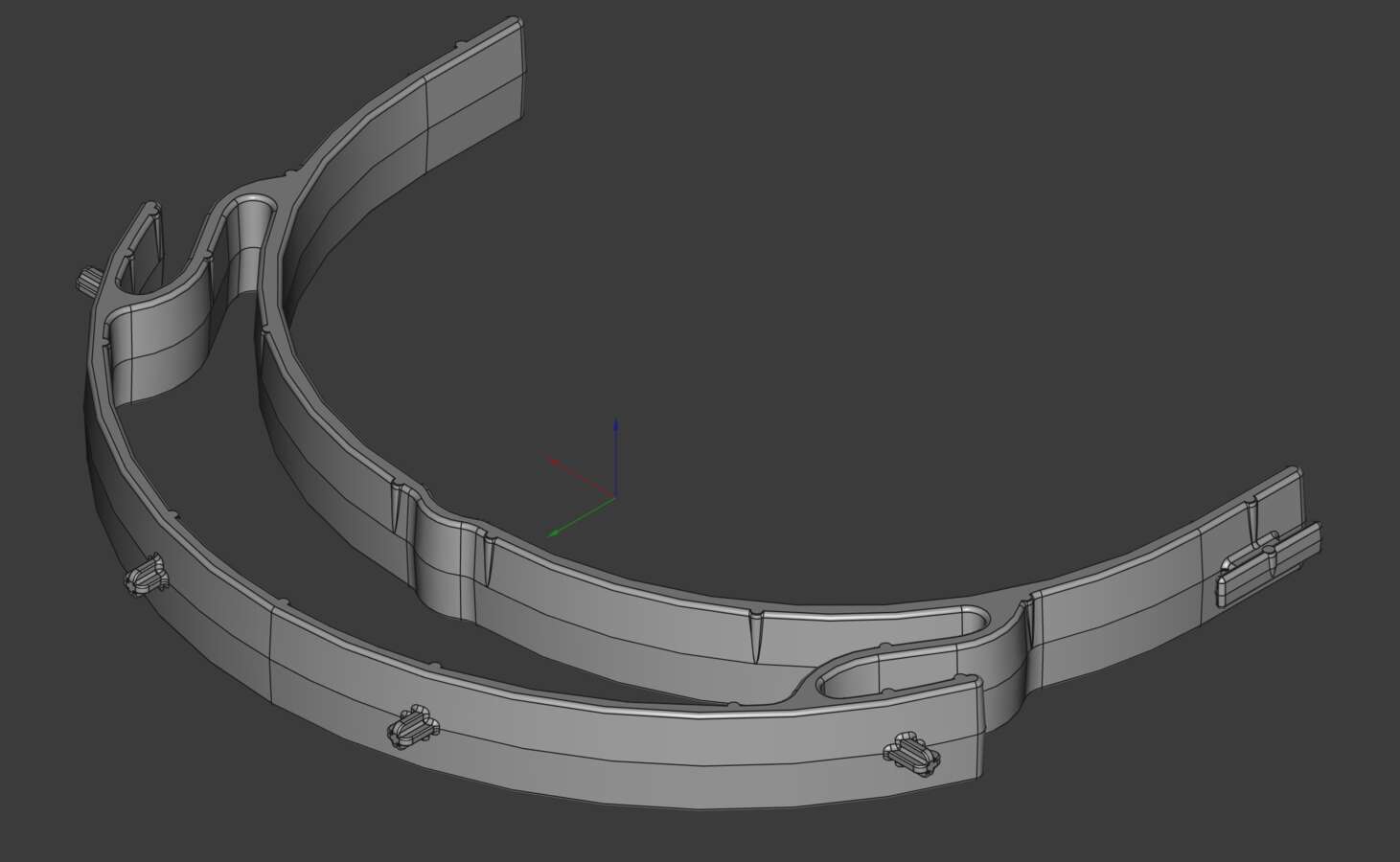
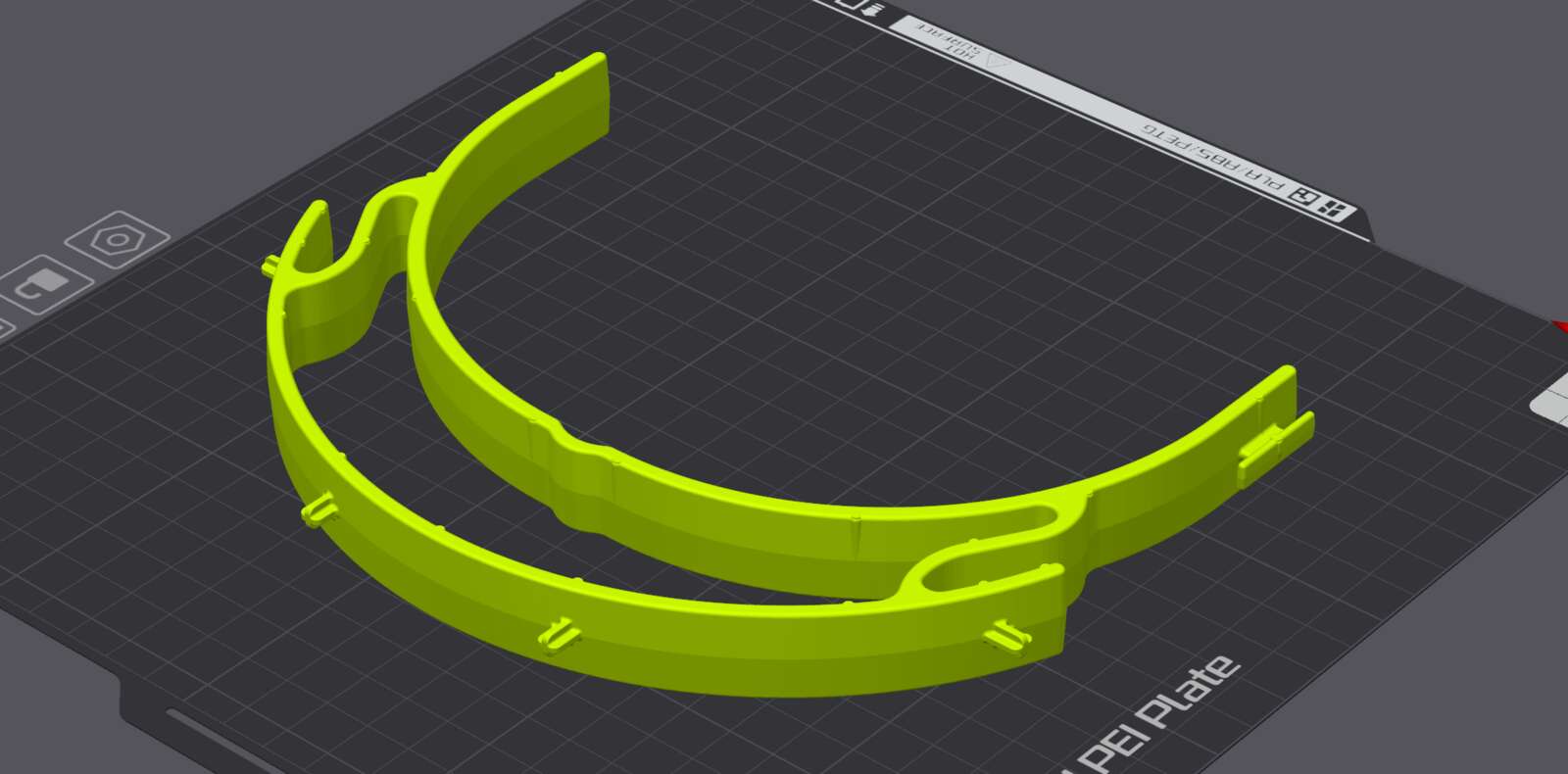
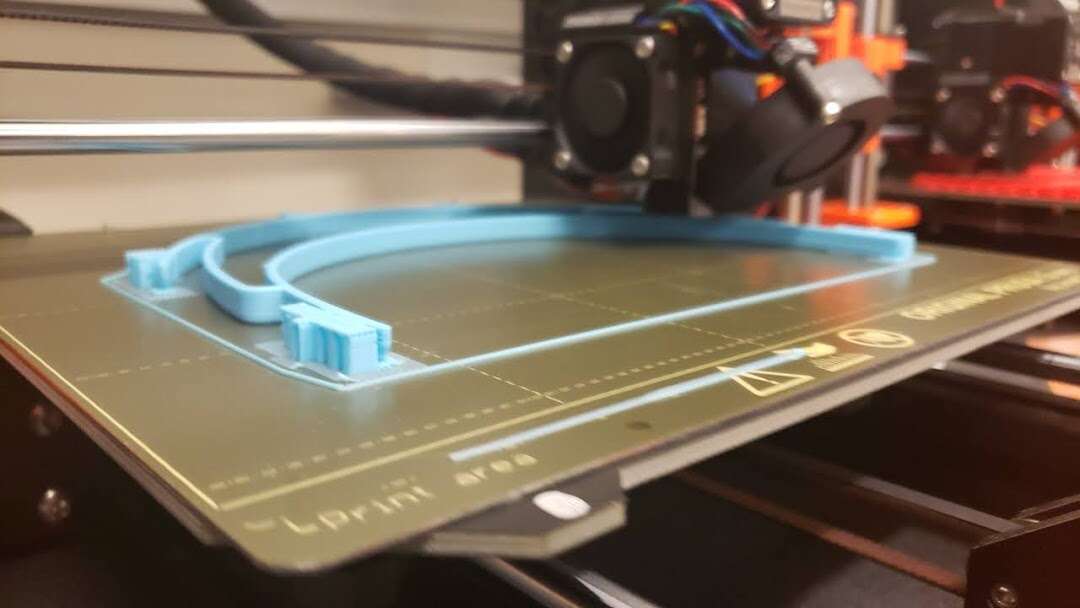
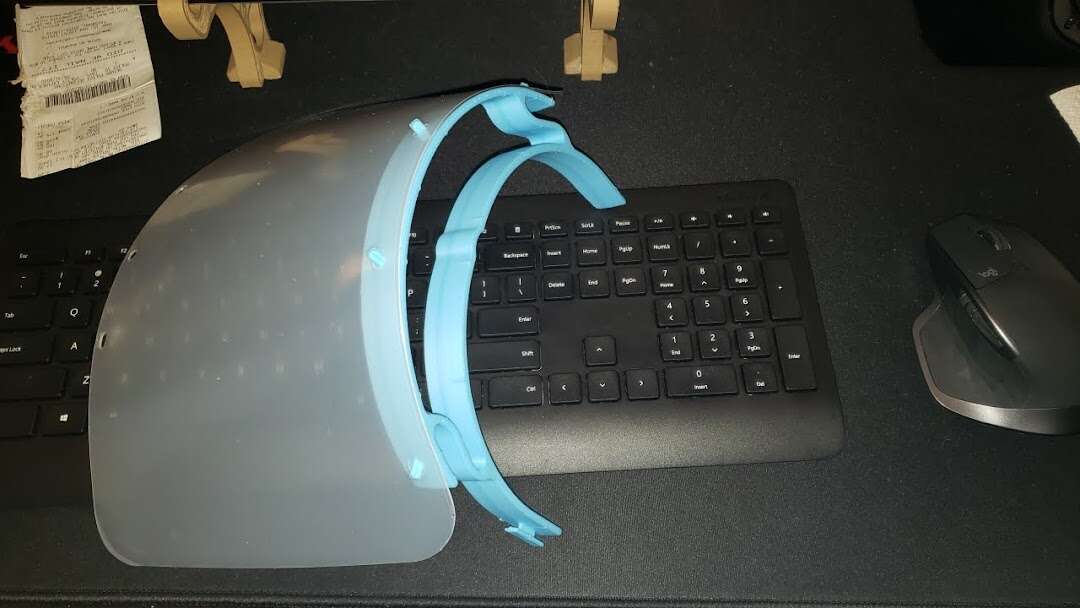
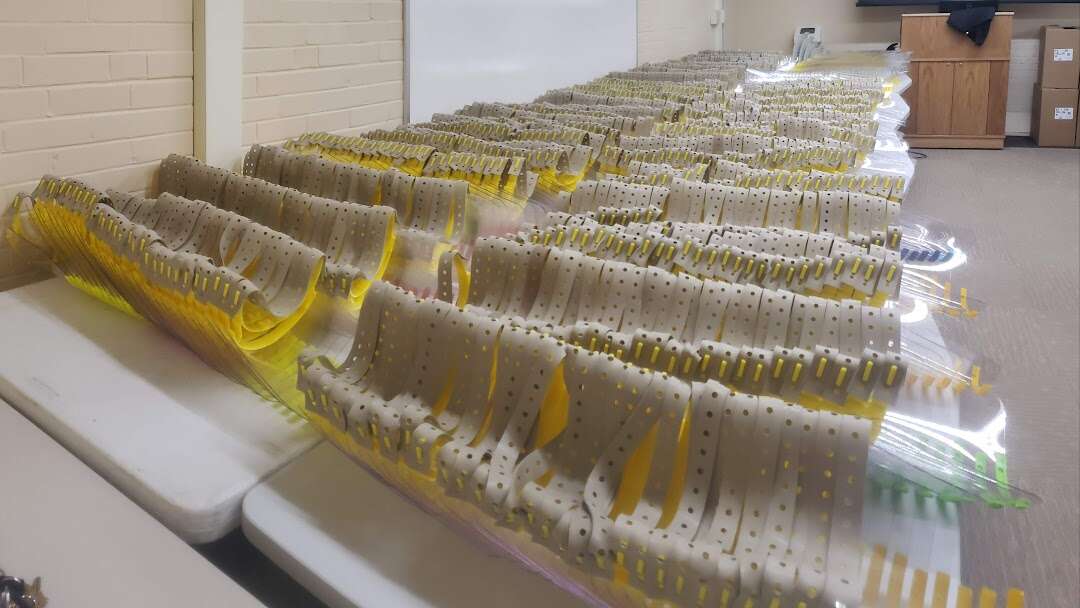
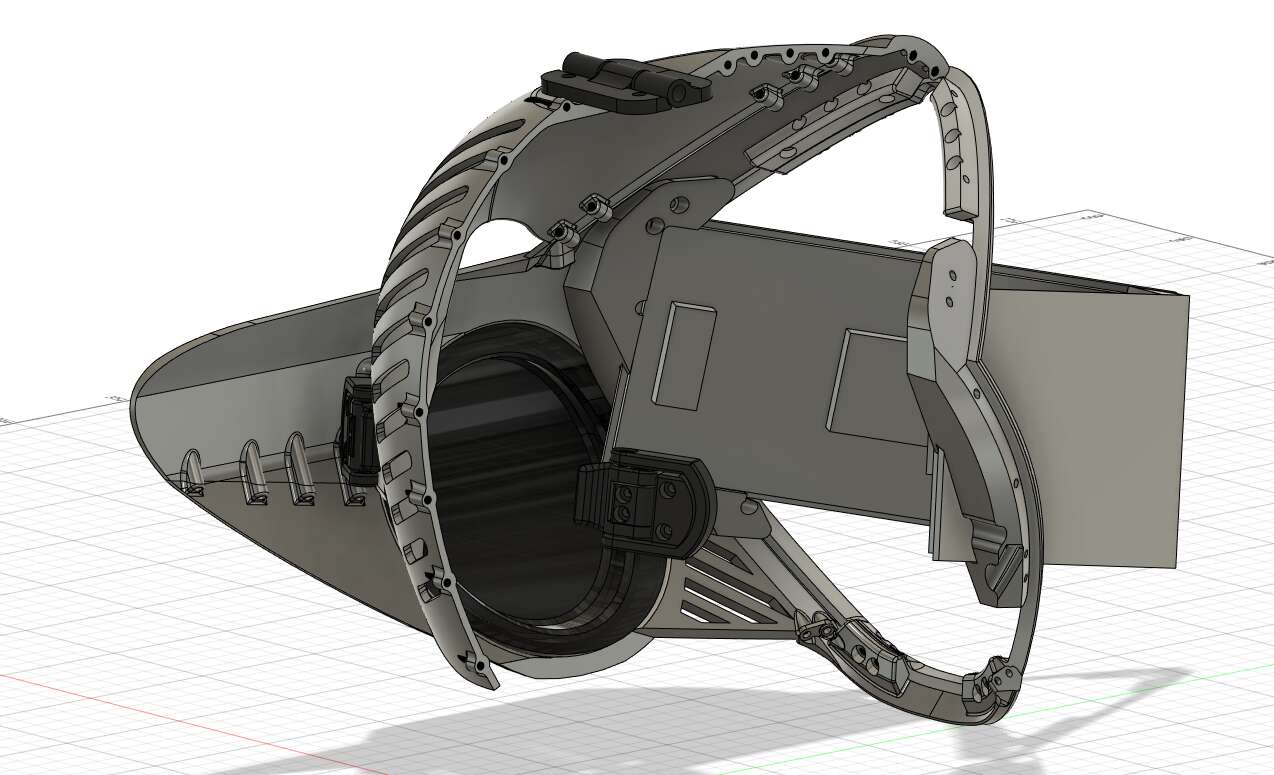
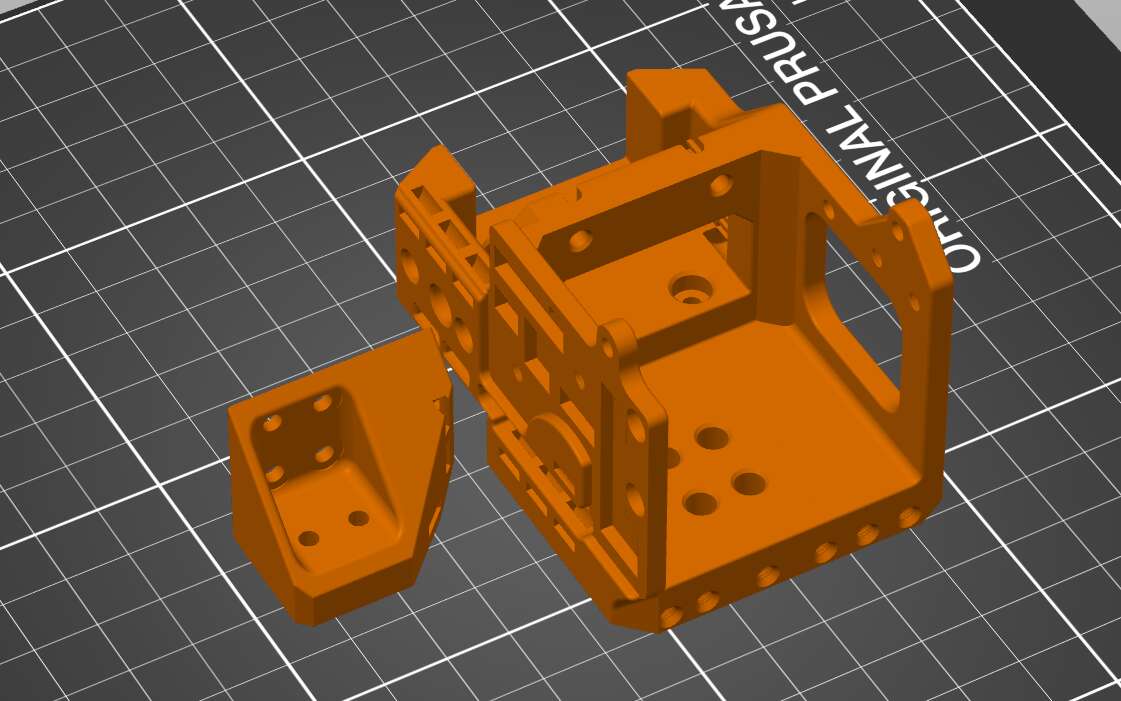
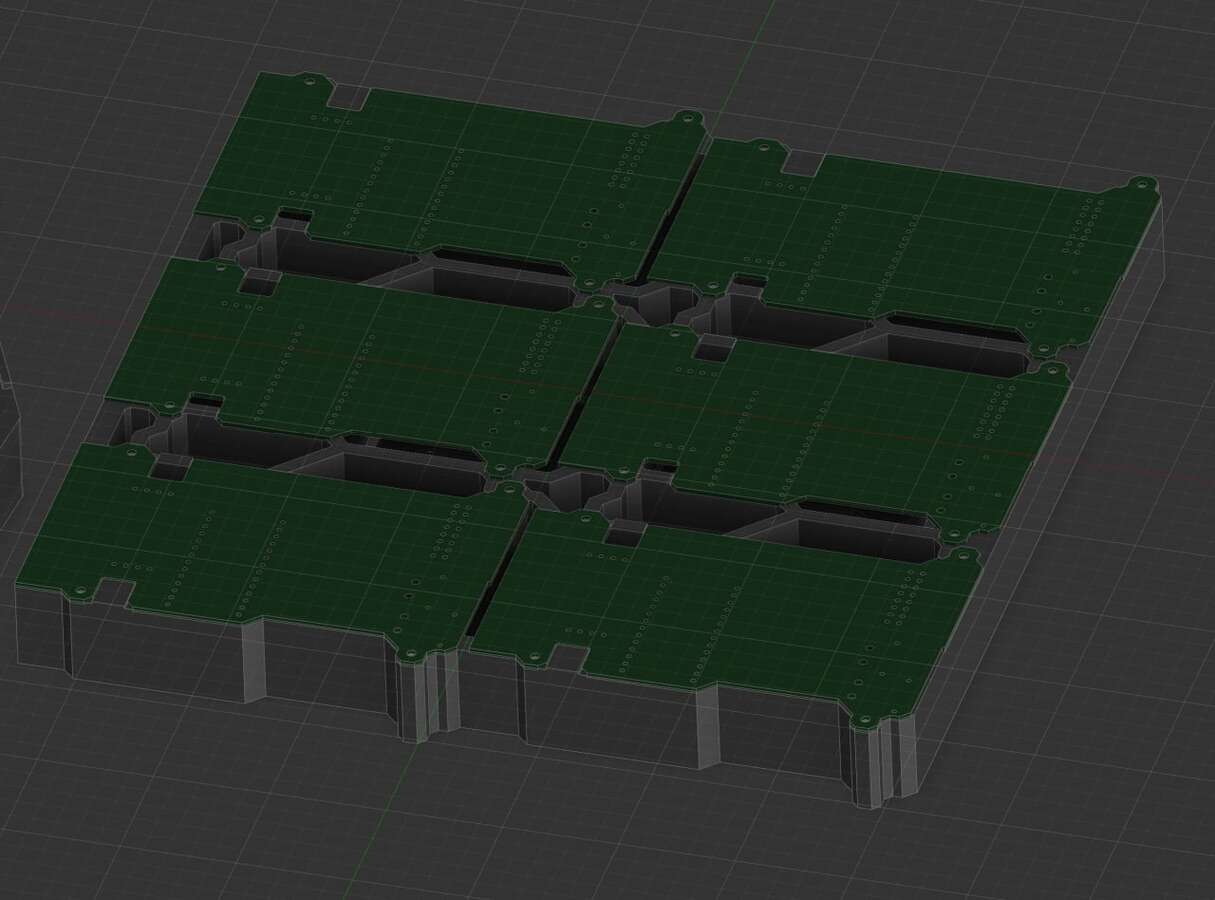
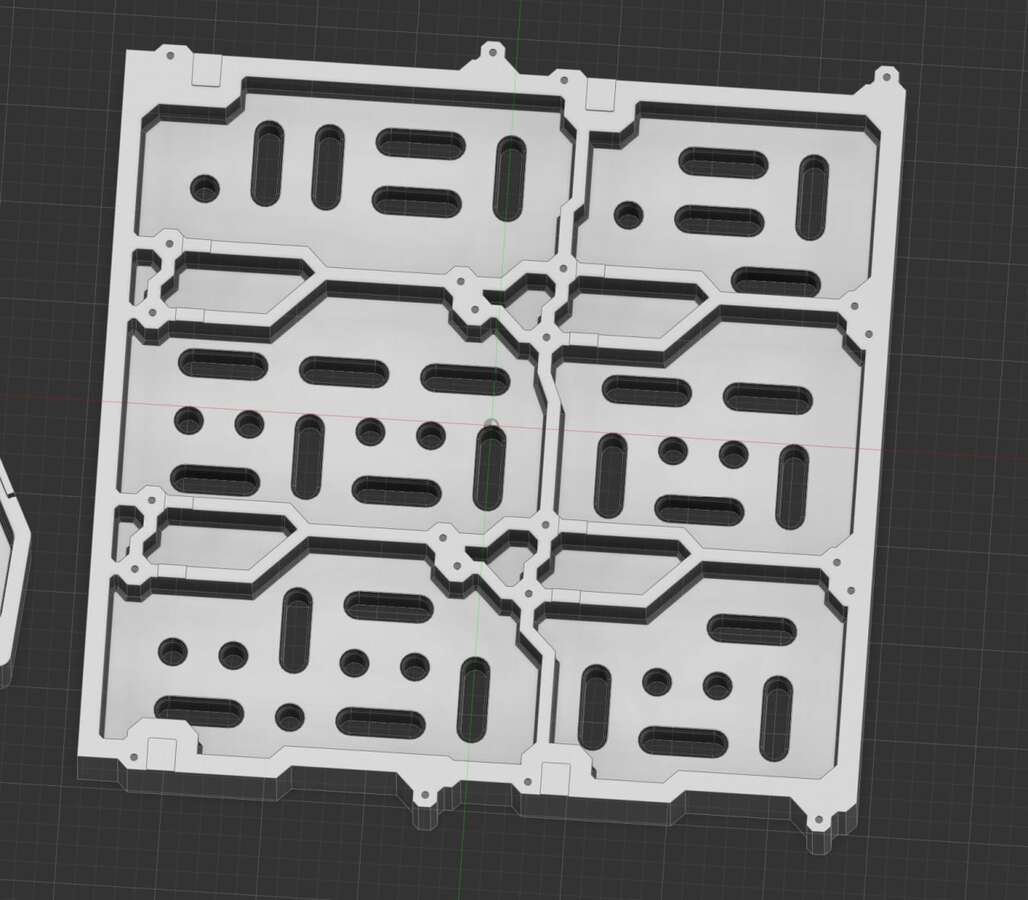
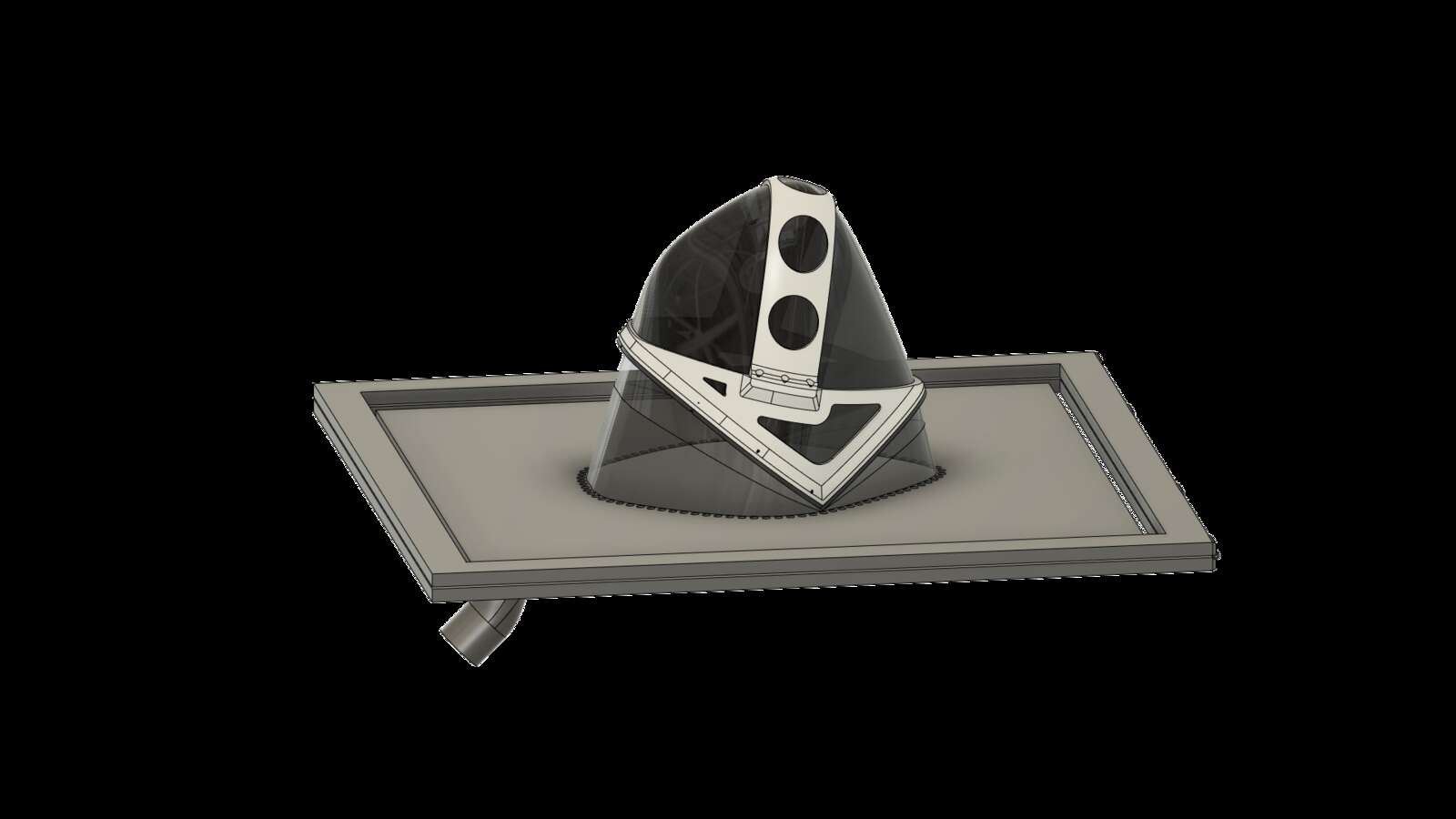
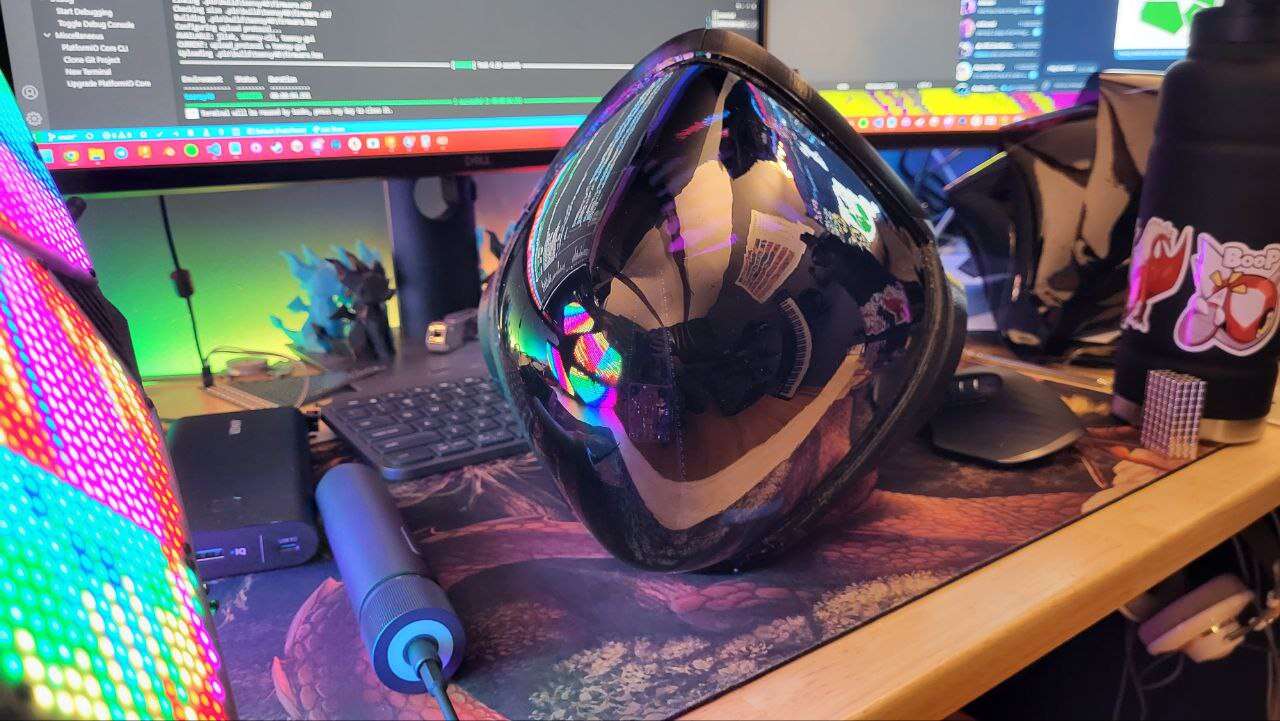
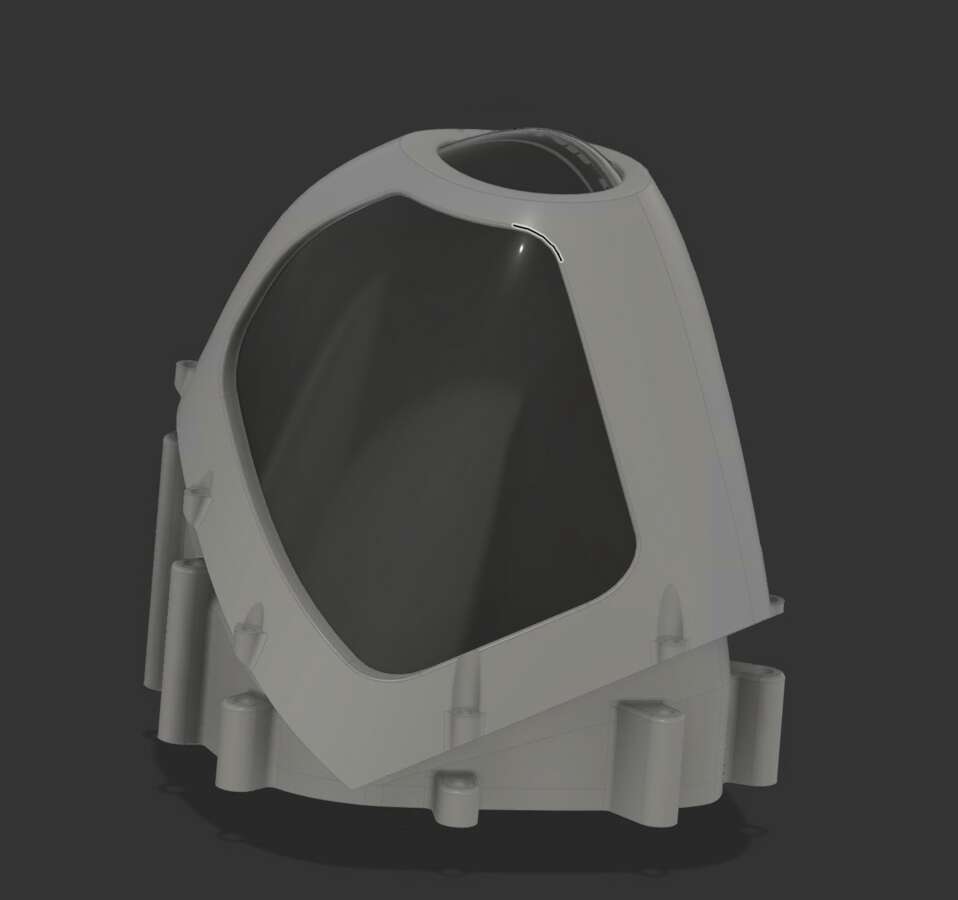
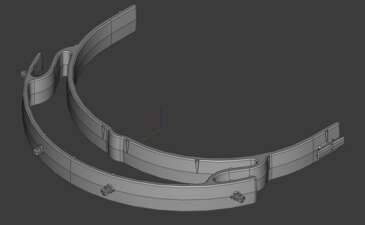
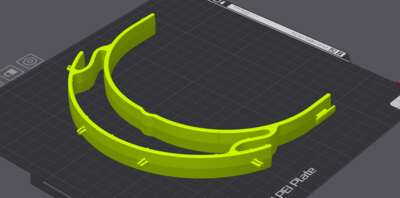
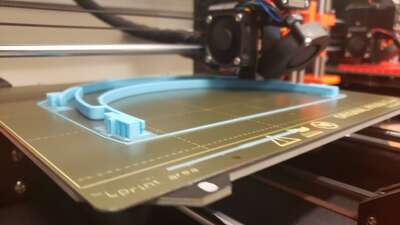
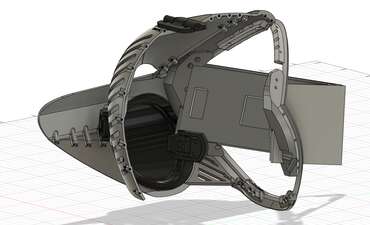
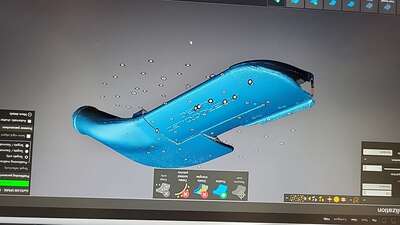
▸ Wearable 3D Printed Designs with Integrated Electronics
| Github | Solo Project | 2020 - Now |


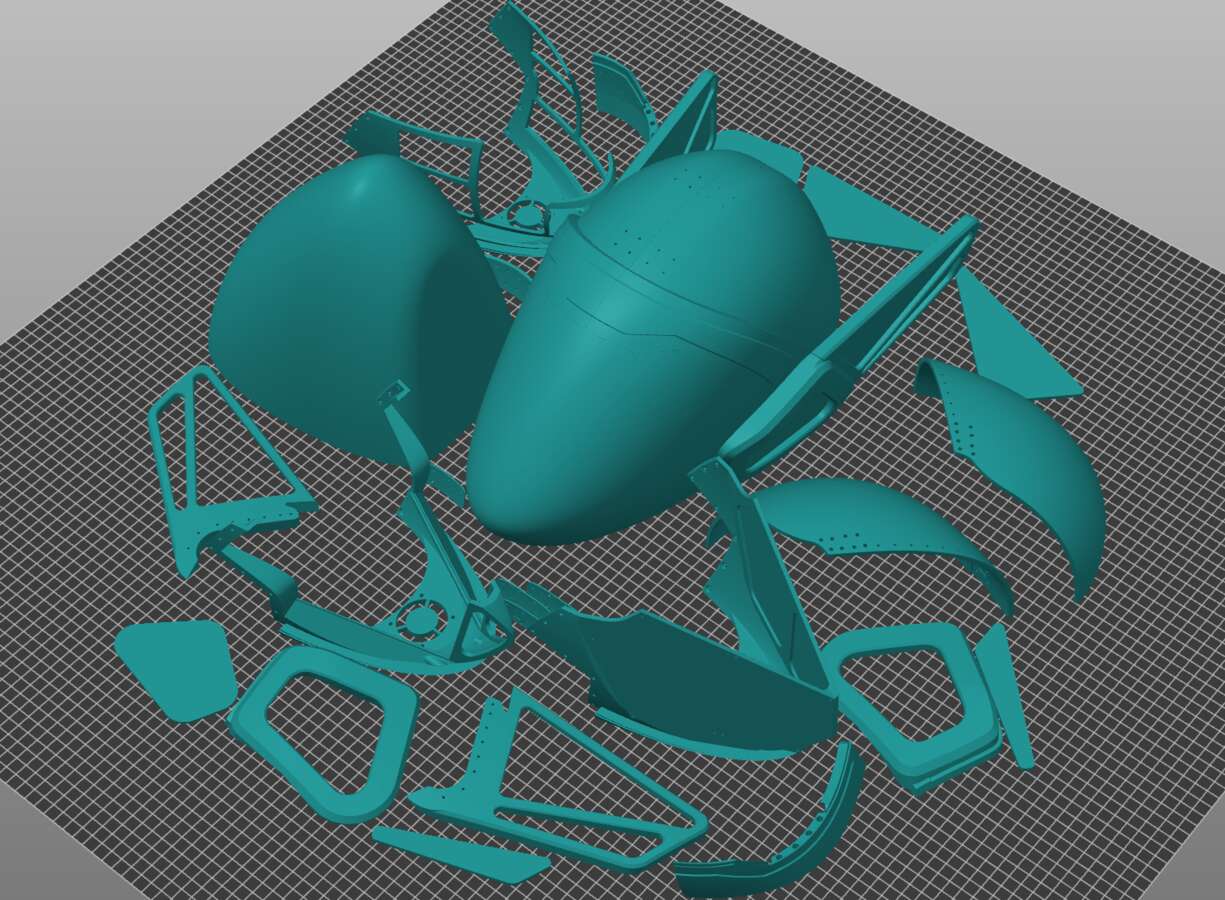
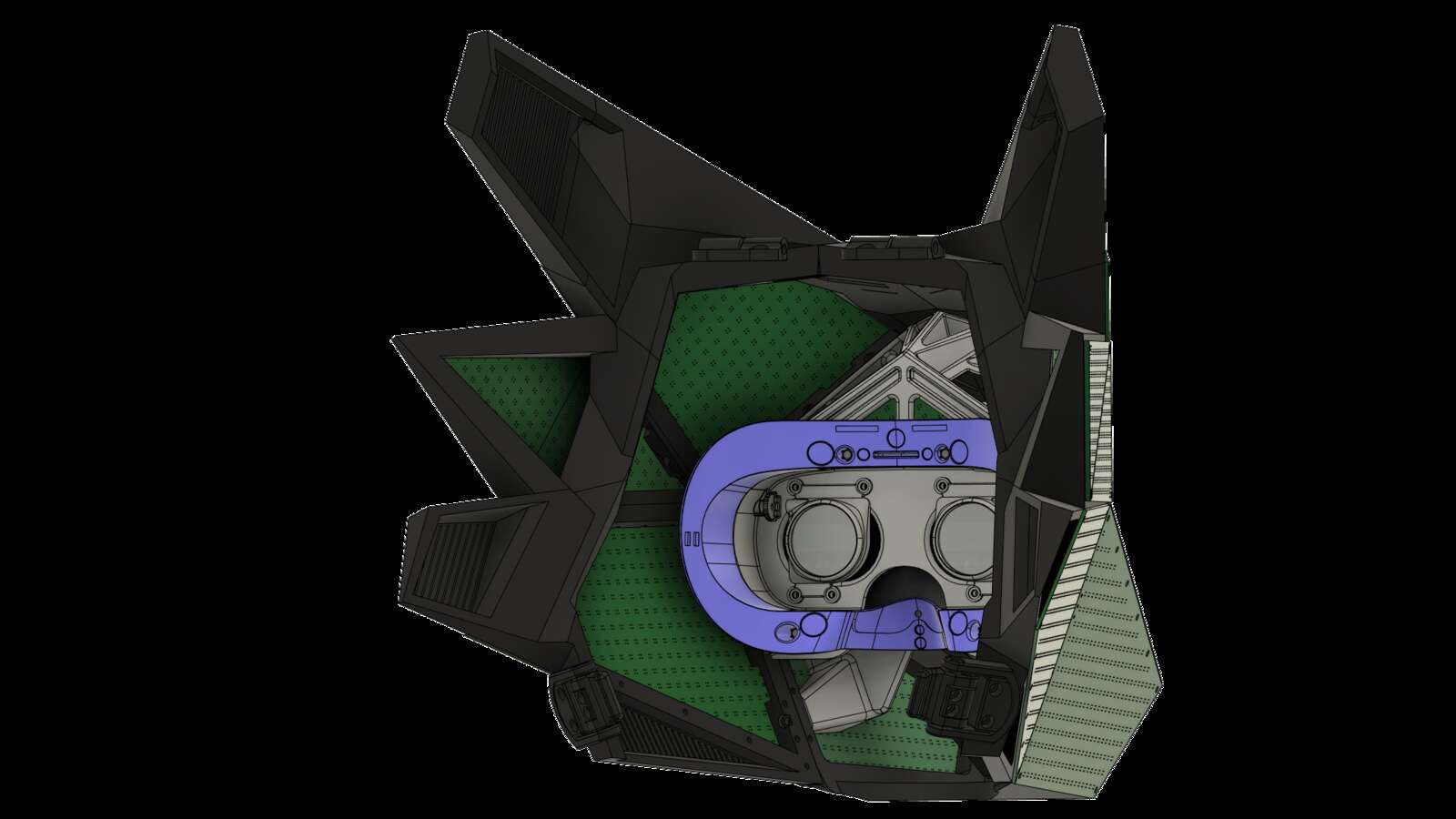
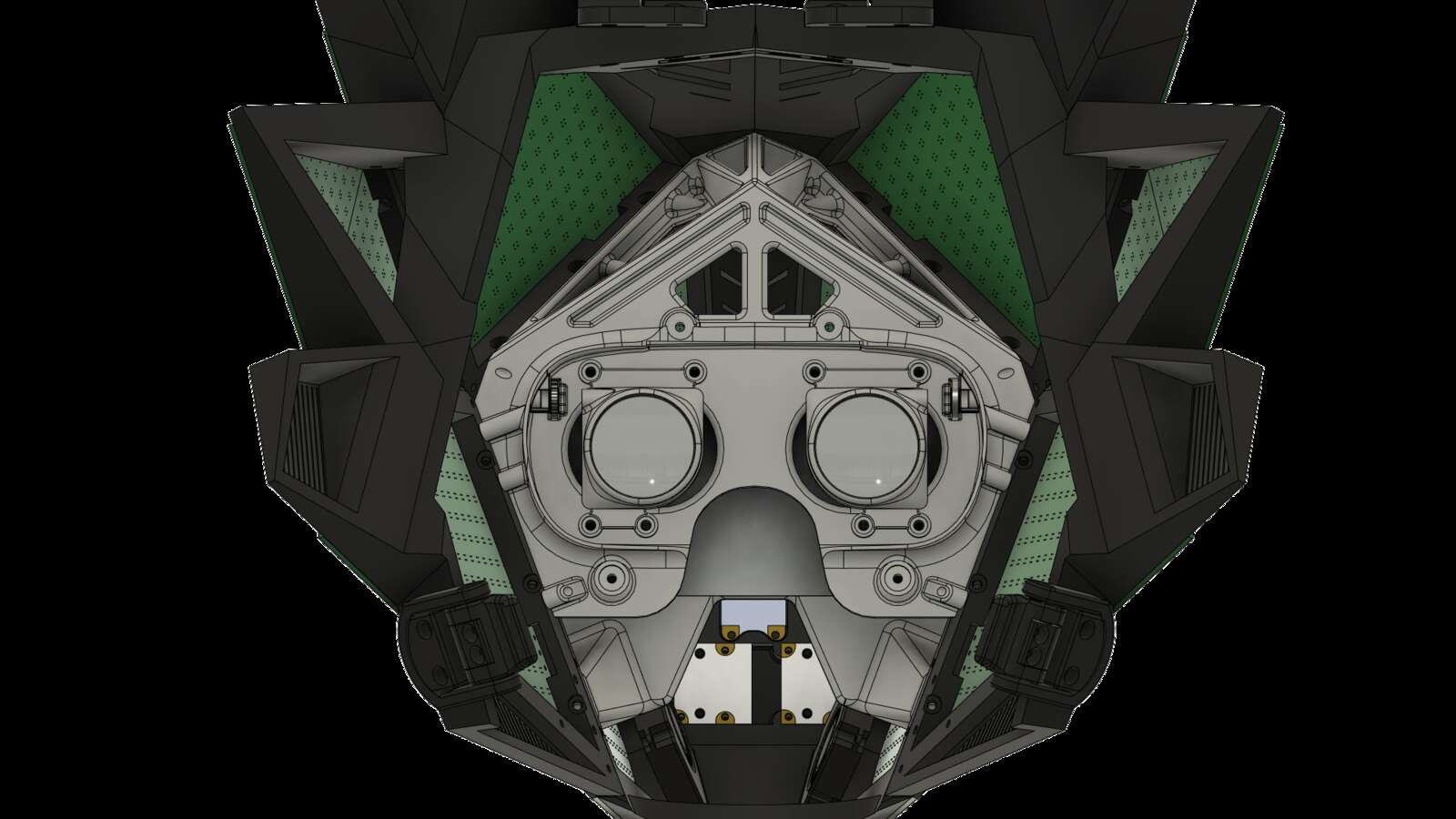


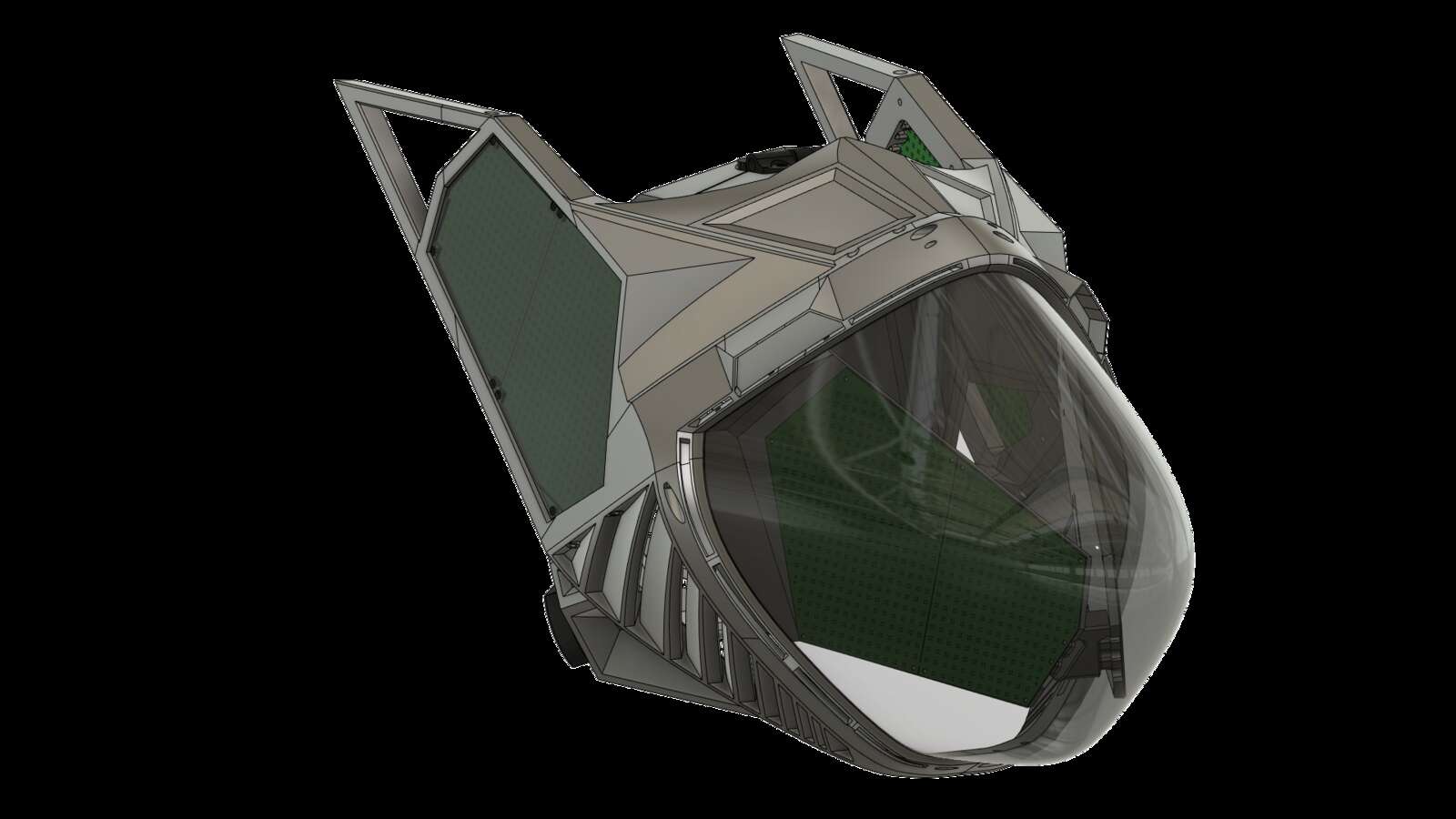
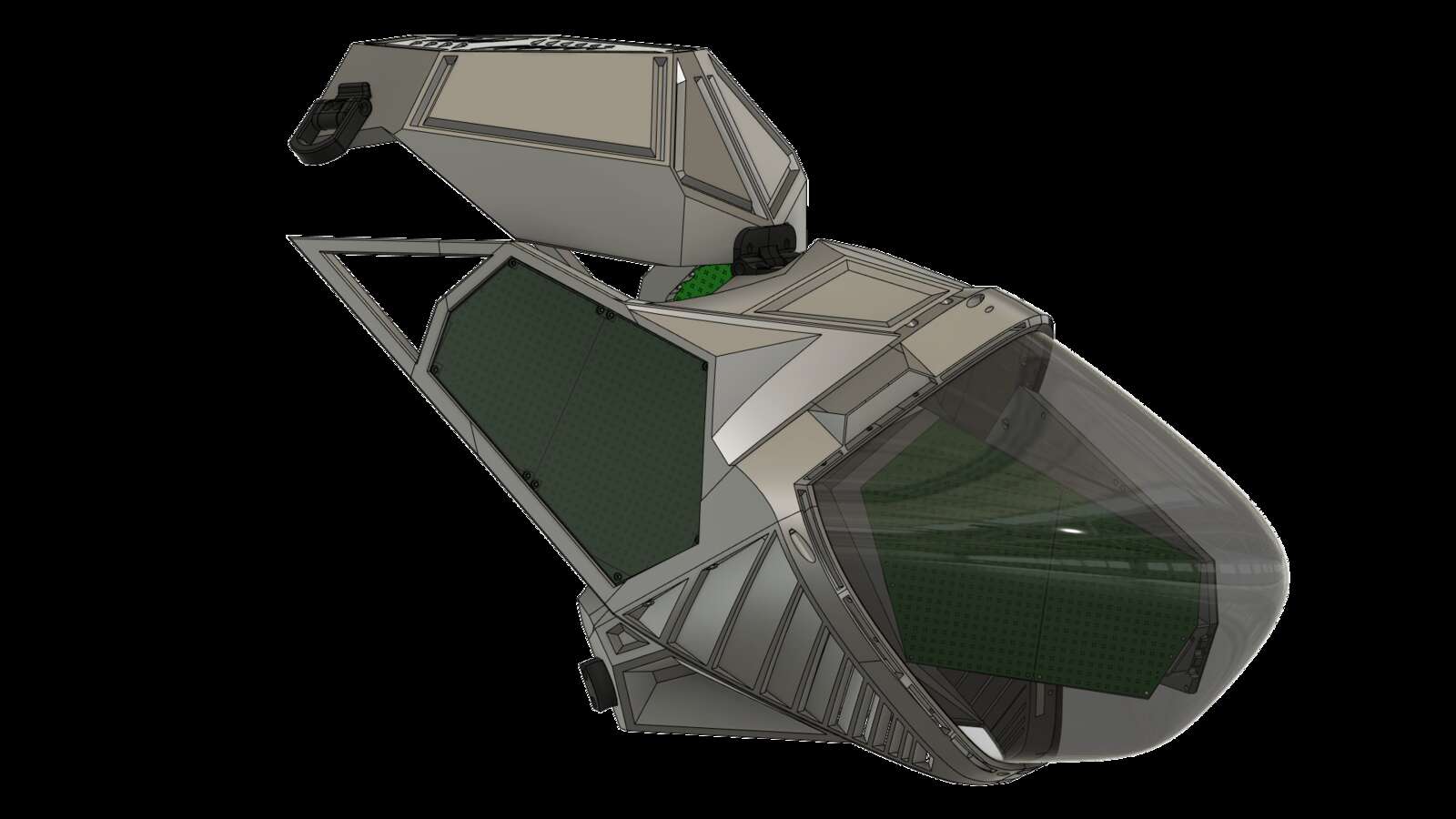
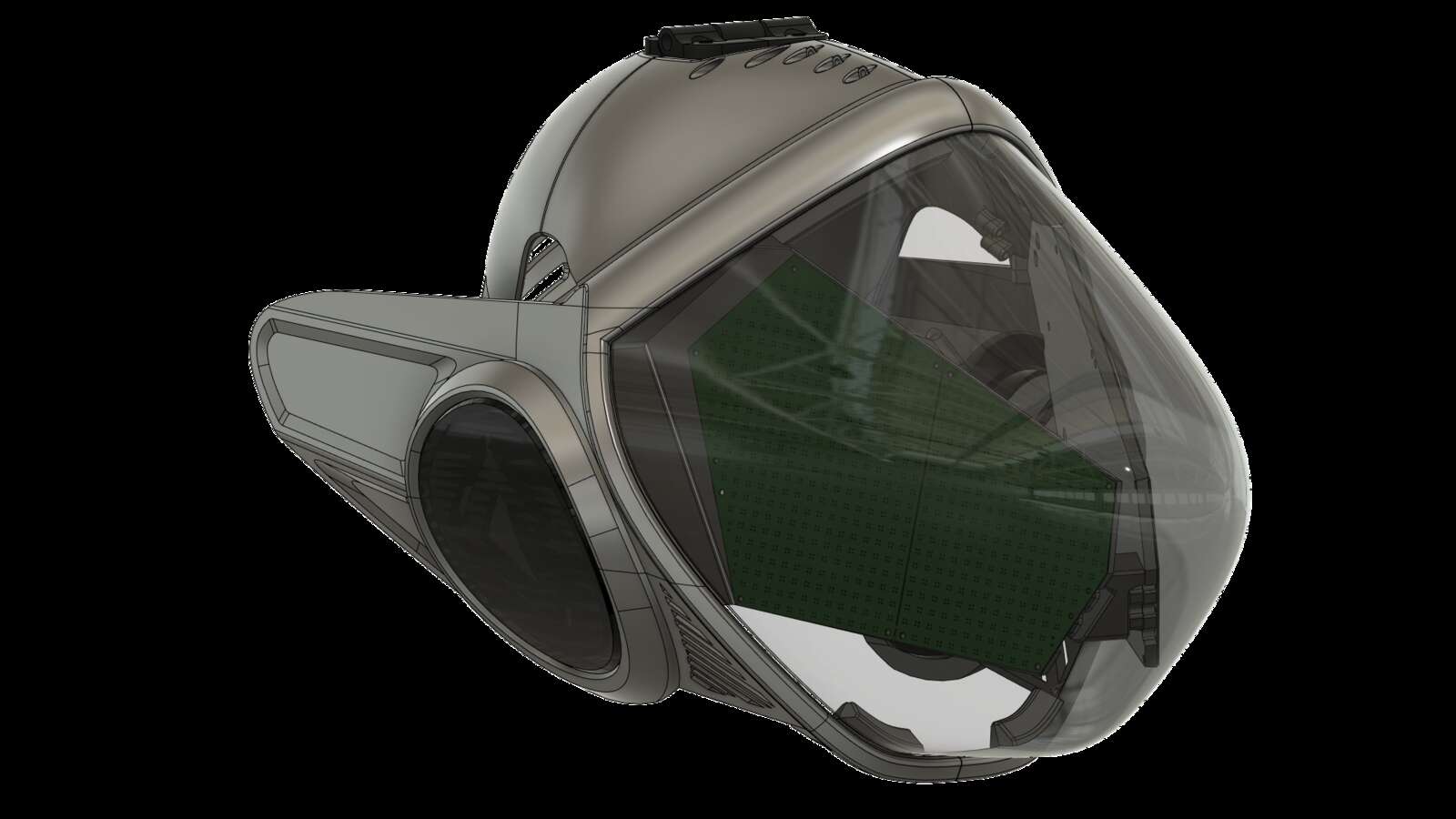

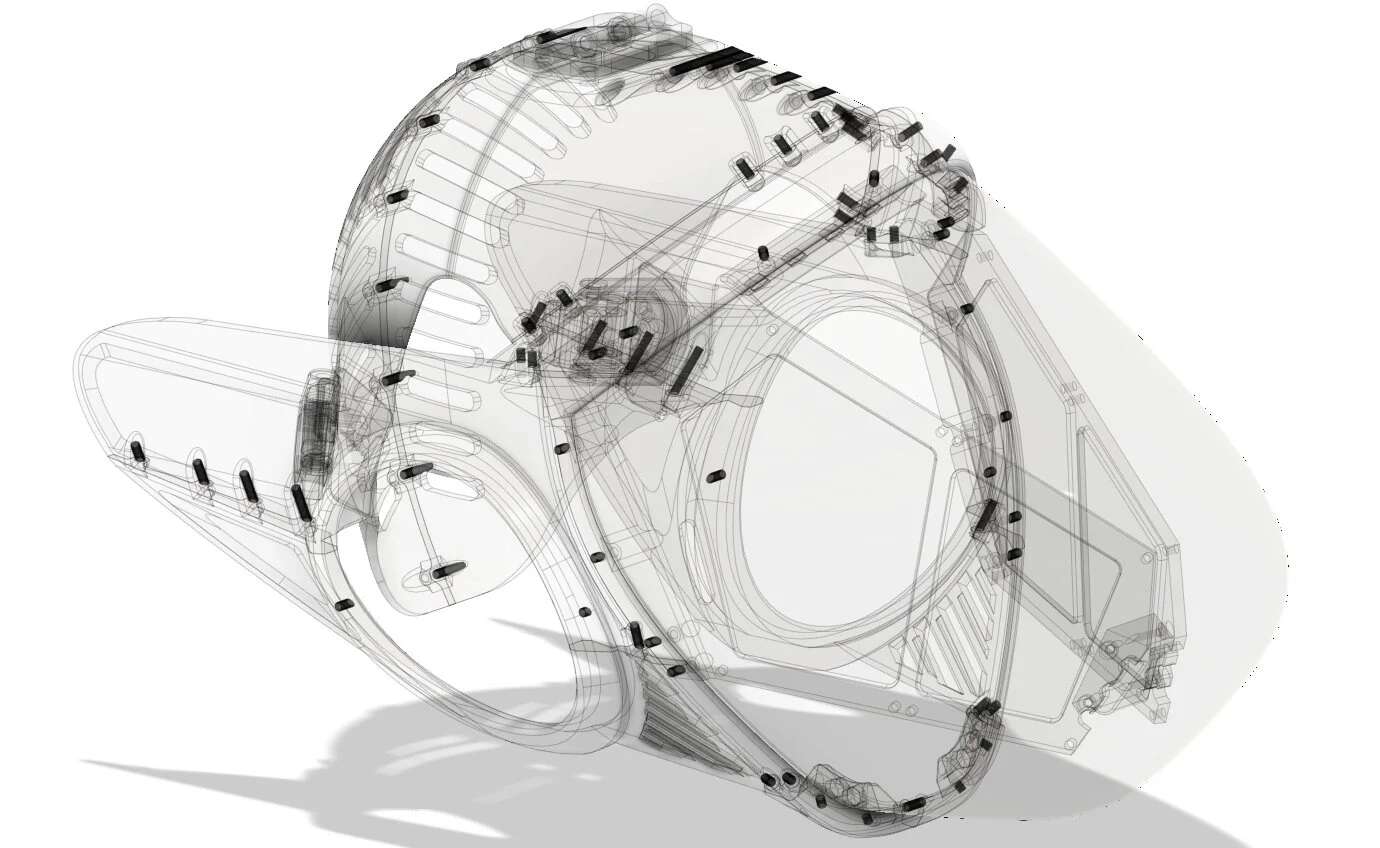









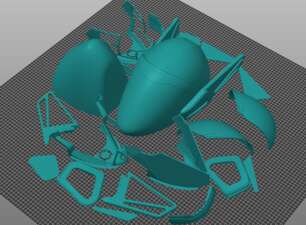
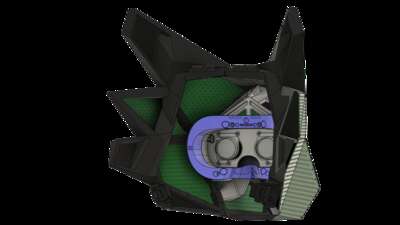
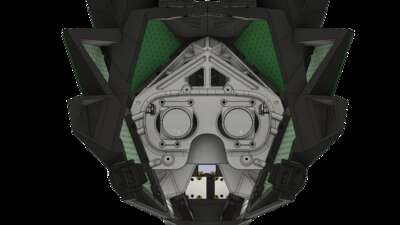



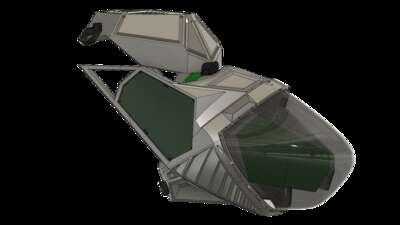


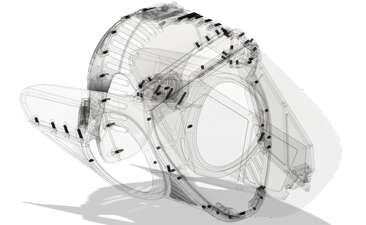
Designed and built 3D-printable cosplay hardware-currently have six designs in total. For the Beta, Delta, Epsilon, and Sigma, each model is available on GitHub as STL files optimized for common 3D printers. Every project includes an electronics wiring guide, custom ProtoTracer firmware binaries, and source code. The Alpha and Gamma prototypes use real-time stereoscopic passthrough vision with a custom lens stack and display module. The vision-systems use modified software (running on a Raspberry Pi CM4) to reduce latency to about 15 ms and support the stereoscopic live synchronized display. This leaves as much area as possible for the LED displays. Each uses two synchronized microcontrollers to render live 3D graphics on the full-face displays. Integrated front-facing distance sensors and a 9-axis IMU modify the animation pipeline, so animations react instantly to motion and proximity. |
||
▸ Dual-Tilt Rotor Quadcopter
| GitHub | Software Solo | Hardware by Co-Workers | 2018 - 2019 |
This project is an integrated control system for a quadcopter with independently tilting rotors. Each motor can pivot on two axes, letting the quadcopter perform complex maneuvers and fly at any angle. This was designed as a system to allow the quadcopter act as a gimbal to allow for a larger statically mounted camera while having a full 360 degree view. Software Stack:
|
||
▸ Other Product Prototyping, Engineering, and Software







|
Advanced Manufacturing
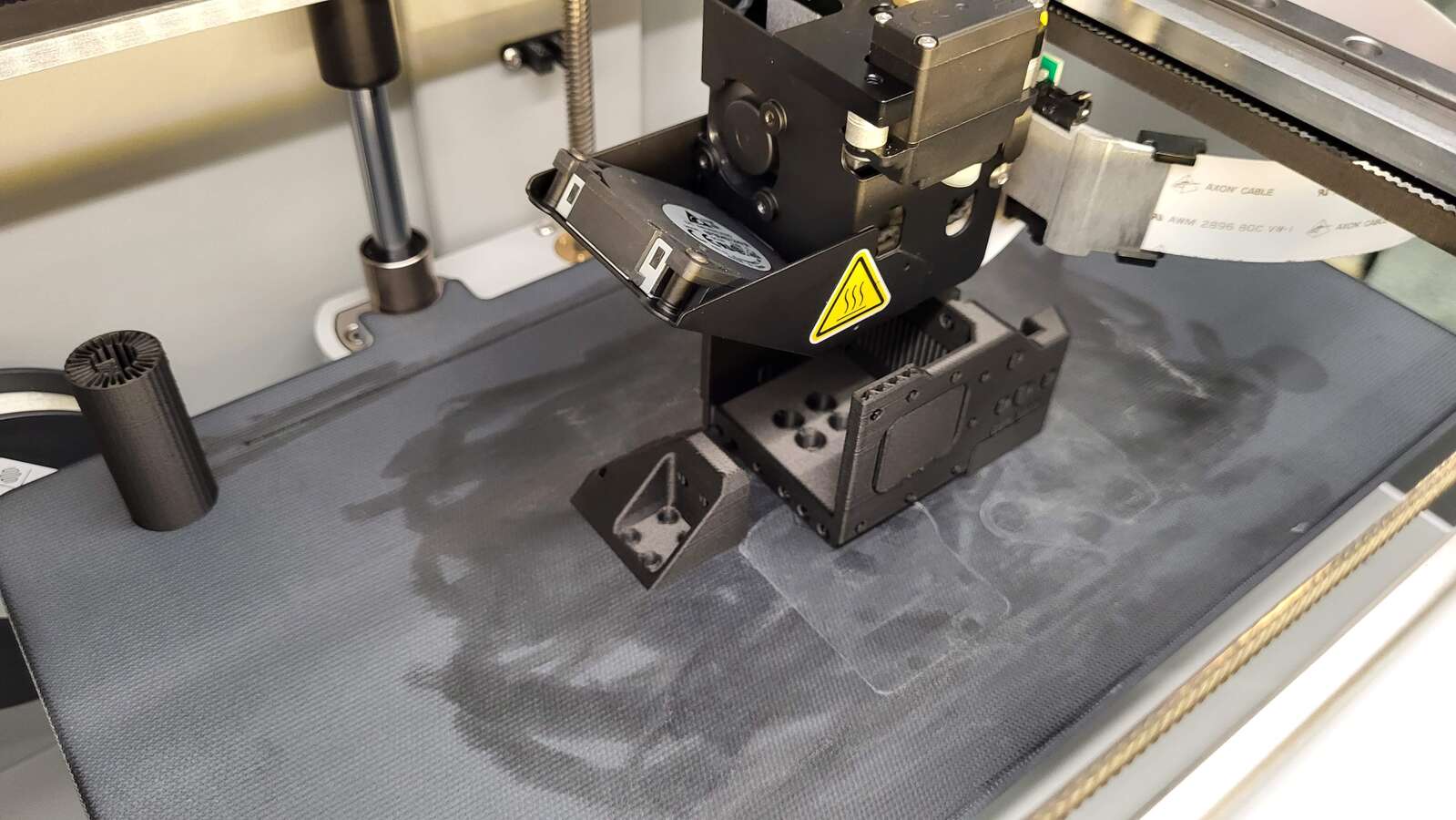
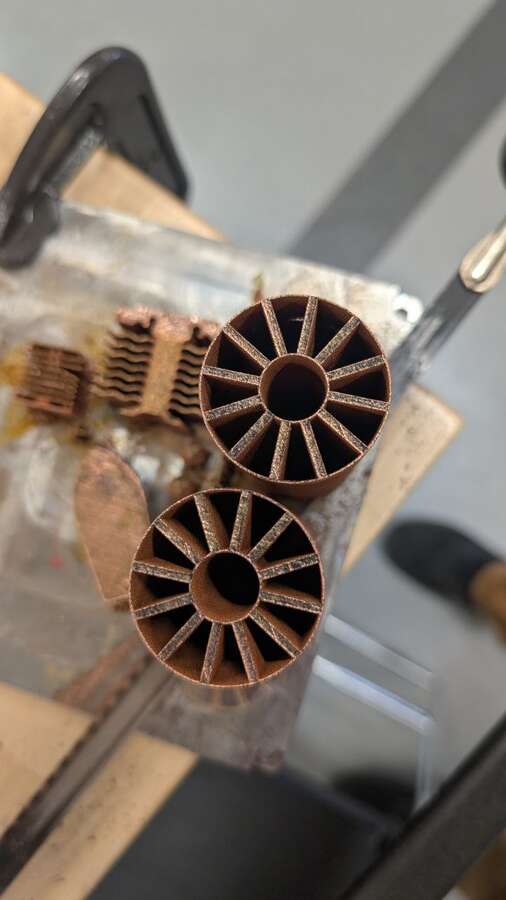
▸ Advanced Additive Manufacturing Technologies
| Collaboration with Co-Worker | 2022 - Now |




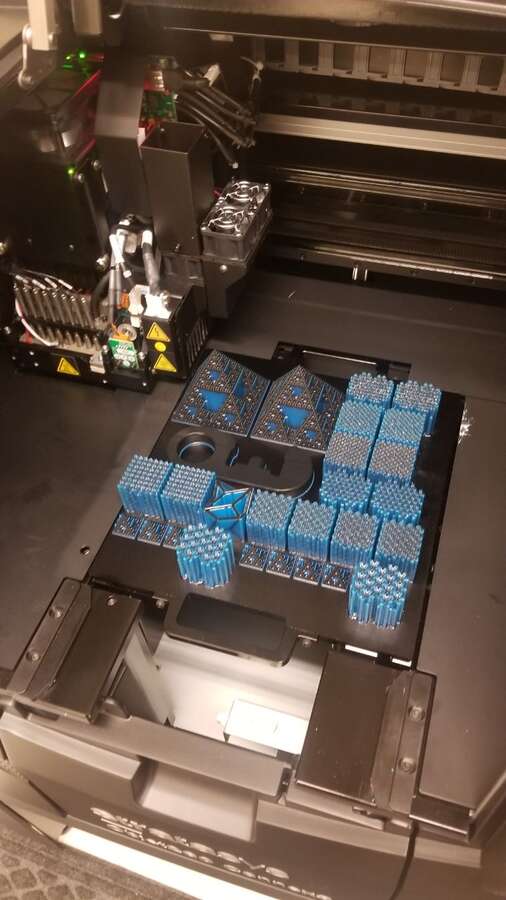
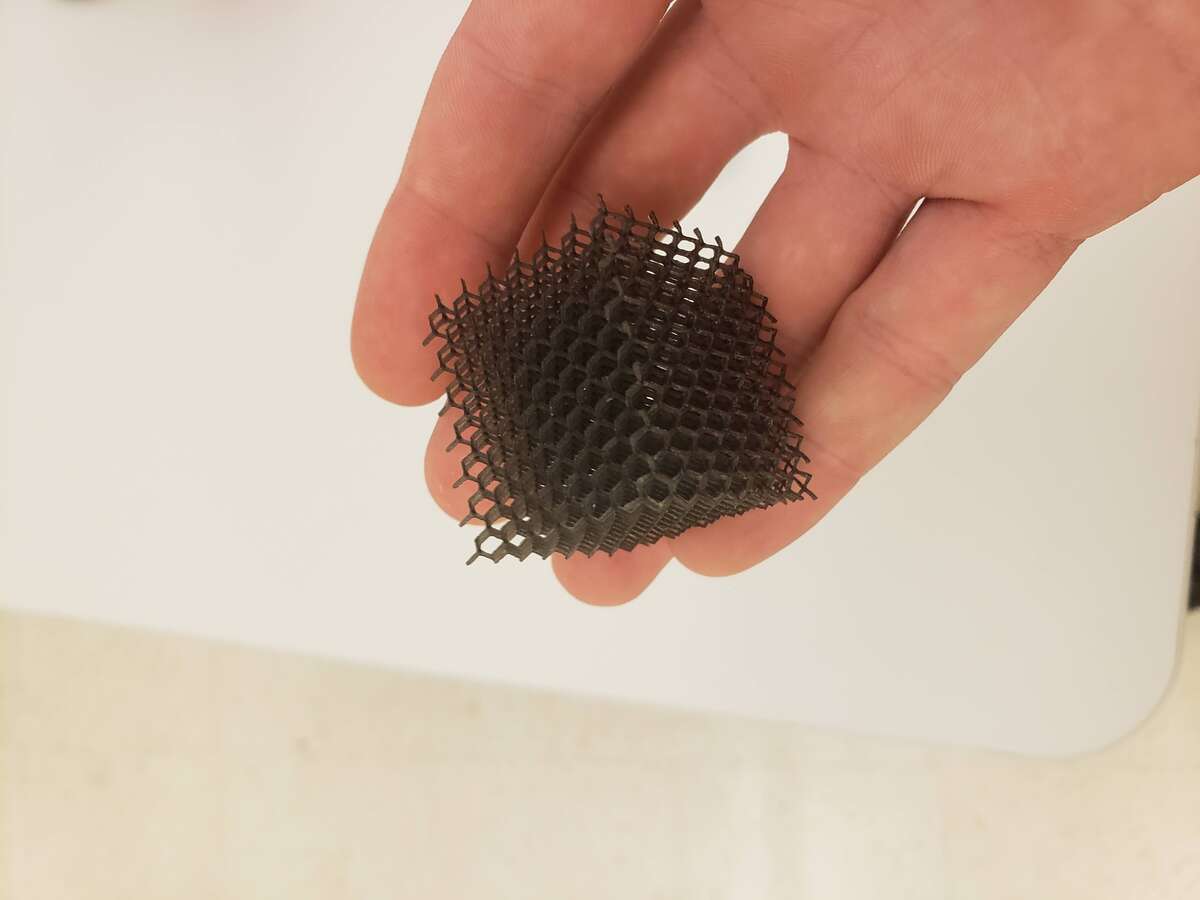

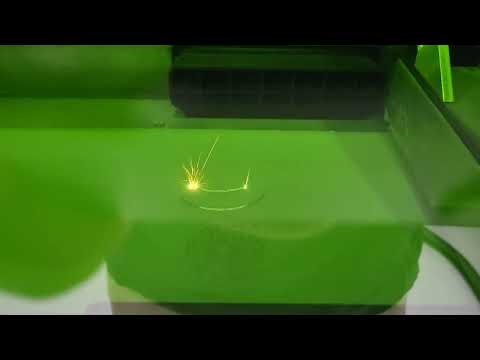












Operator and technician for additive manufacturing platforms. Sharing responsibility for hands‑on testing, day‑to‑day operation, and performing preventative maintenance and repairs. Key systems managed:
|
|
▸ Installation and Operation of Automated Pick-and-Place Assembly Line
| Solo Project | Assistance with Moving Equipment | 2019 - 2021 |

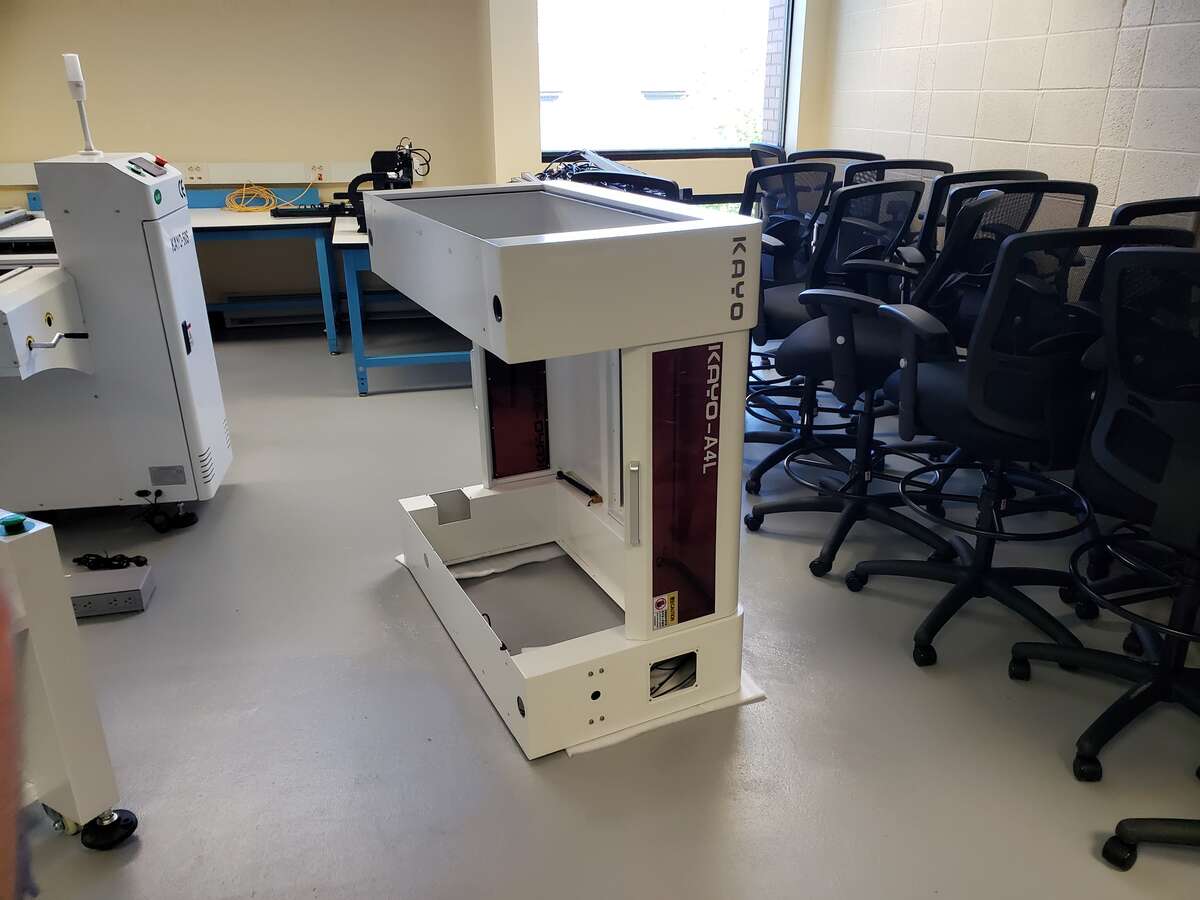
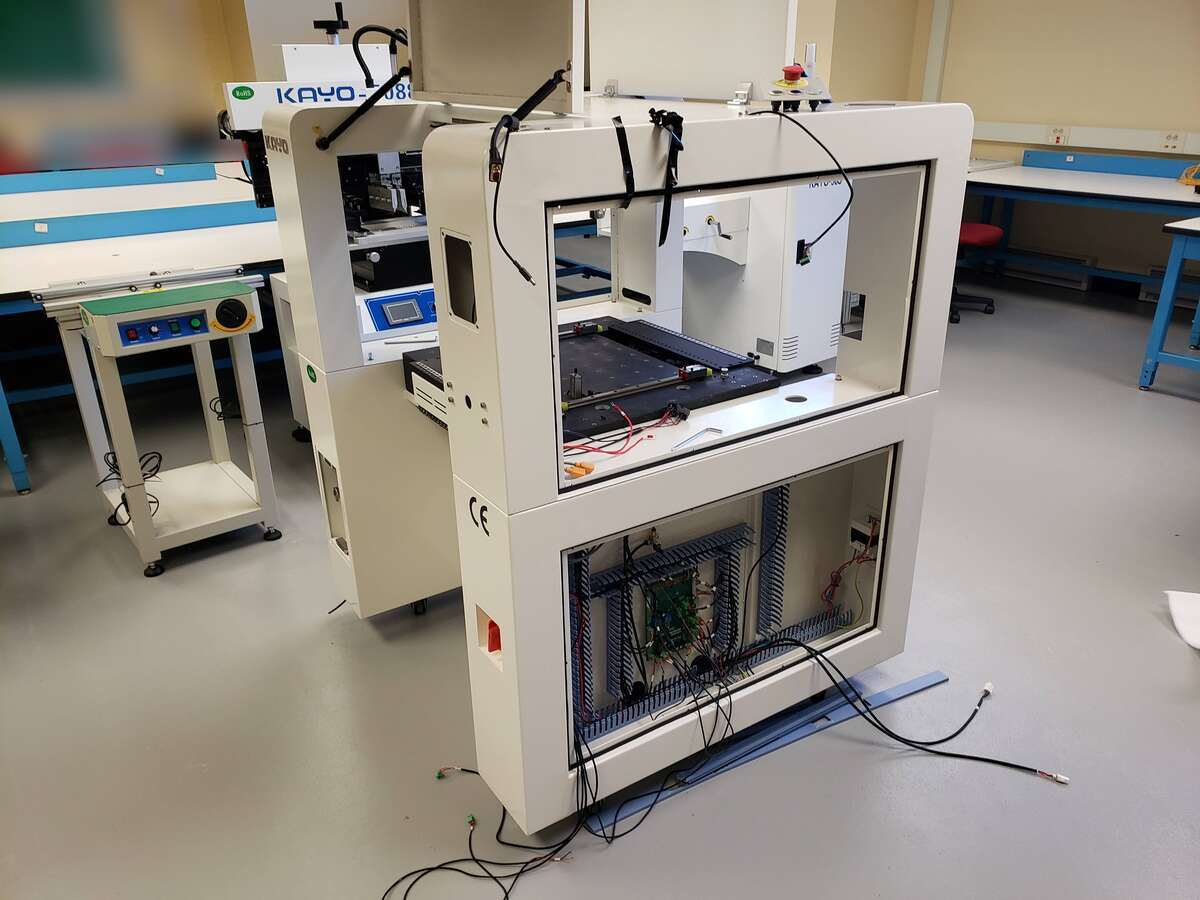

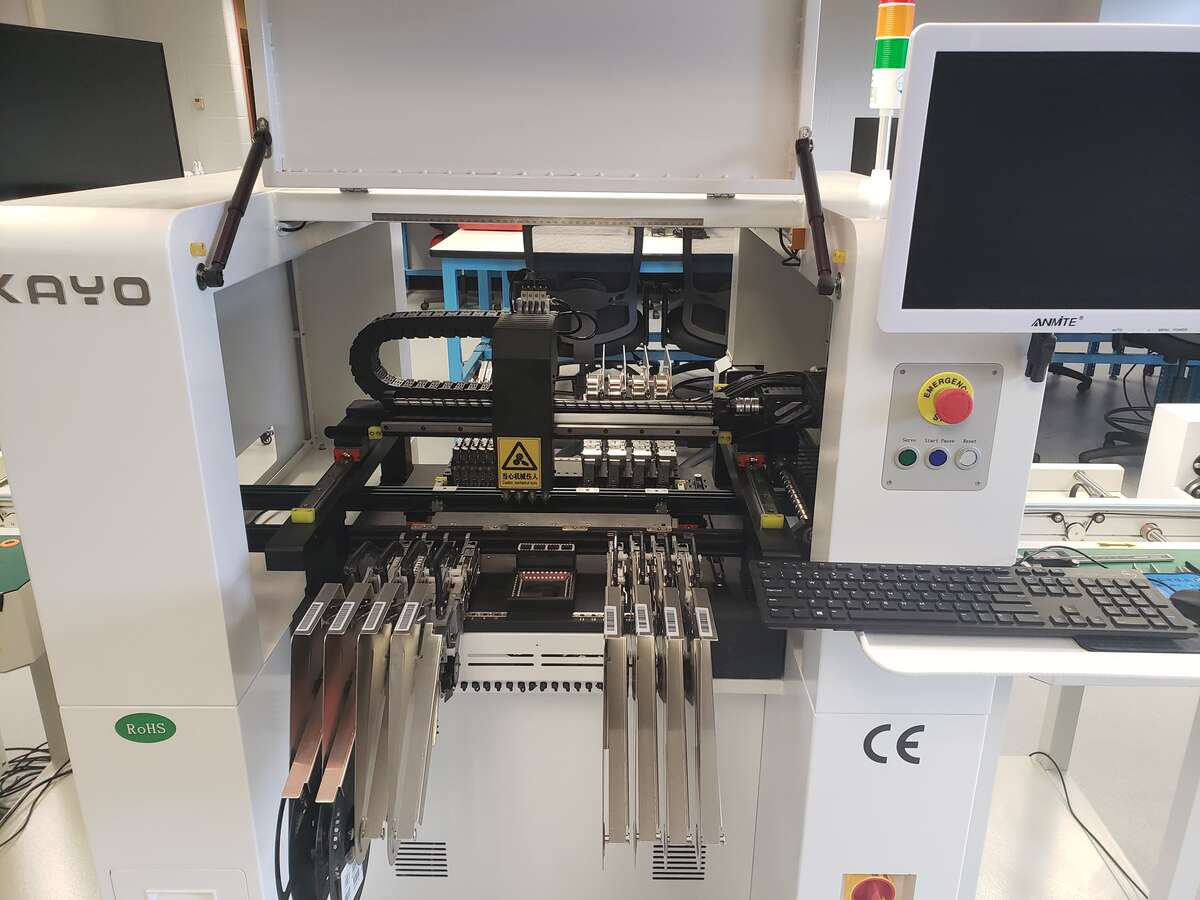






Led the installation, configuration, and operation of an automated pick-and-place assembly line, overseeing the import of the equipment and integrating it within our facility. This project required infrastructure planning, and teardown/rebuild of machinery to match our requirements. The final setup included:
|
|
▸ Design and Creation of Large-Scale Custom Printers
| Design/Software | Project with Two Co-Workers | 2015 - Now |




Collaborated with two engineers to build a large-format Delta 3D printer prototype (10ft tall x 6ft wide) in 45 days. Although intended as a proof of concept, it produced usable parts up to 6ft tall. Contributions:
|
|
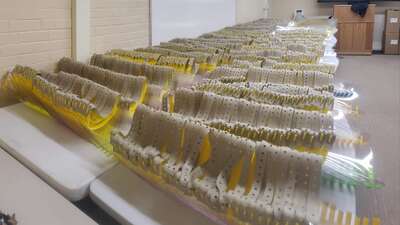
▸ Print Farm Implementation and Management
| Implemented with Co-Worker | 2023 - Now |






Worked with a co-worker to implement and operate a 30x BambuLab (P1S, X1 Series X1C and H2D, A1/A1 Mini) and 30x Prusa (MK4S, XL, MK3S, Mini) 3D printer farm, I helped optimize most aspects of our additive manufacturing workflow:
|
|
▸ Injection Molding, Vacuum Forming, and Specialized Tooling Design
| Face Shields with Co-Worker | Rest are Solo Projects | 2011 - Now |


























Developed tooling solutions for injection molding, vacuum forming, and jig creation for repeated tasks:
|
|
▸ Other Manufacturing Technology Expertise
| Share with Co-Worker | 2020 - Now |














Operator, programmer, and technician for a variety of manufacturing tools:
|
|
High-Performance Computing and Systems Infrastructure
▸ Hyper-Converged Infrastructure (HCI) Design and Implementation
| Solo Implementation, Management, and Operation | 2019 - Now |
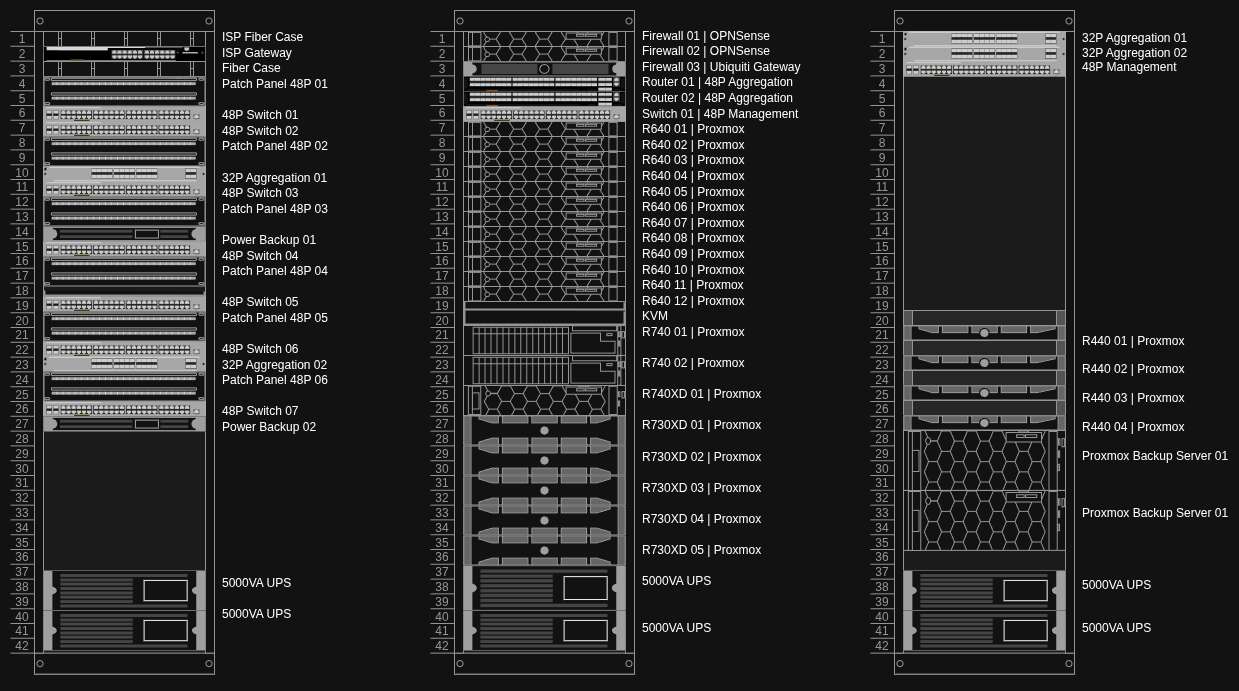

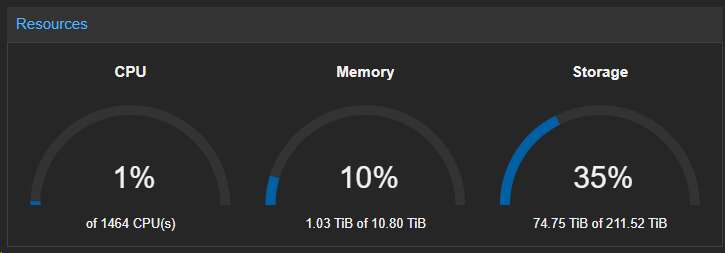
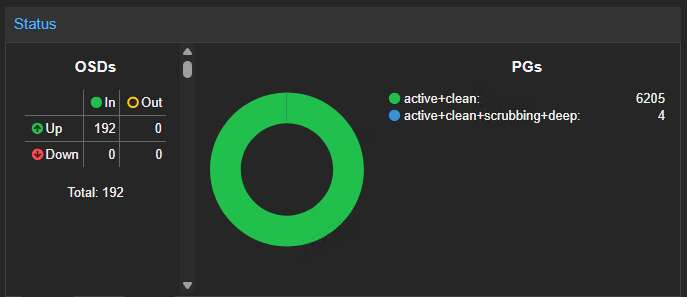
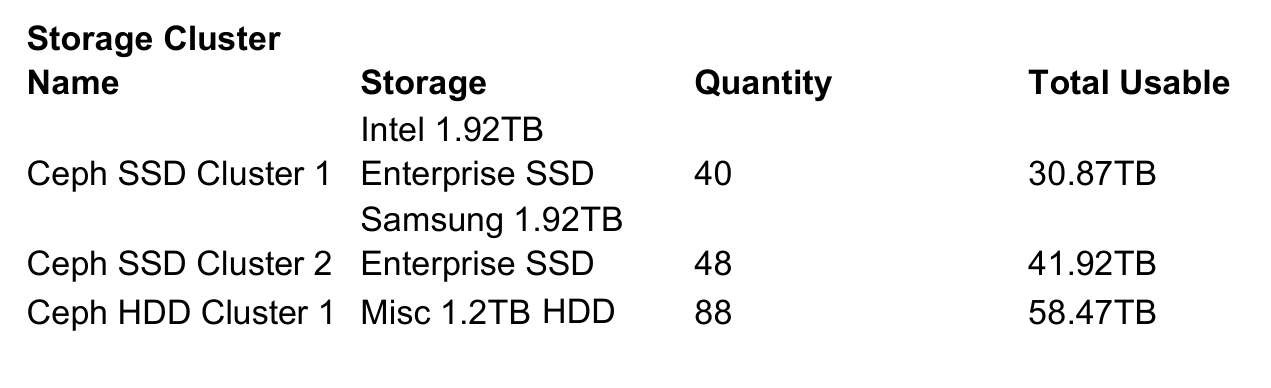






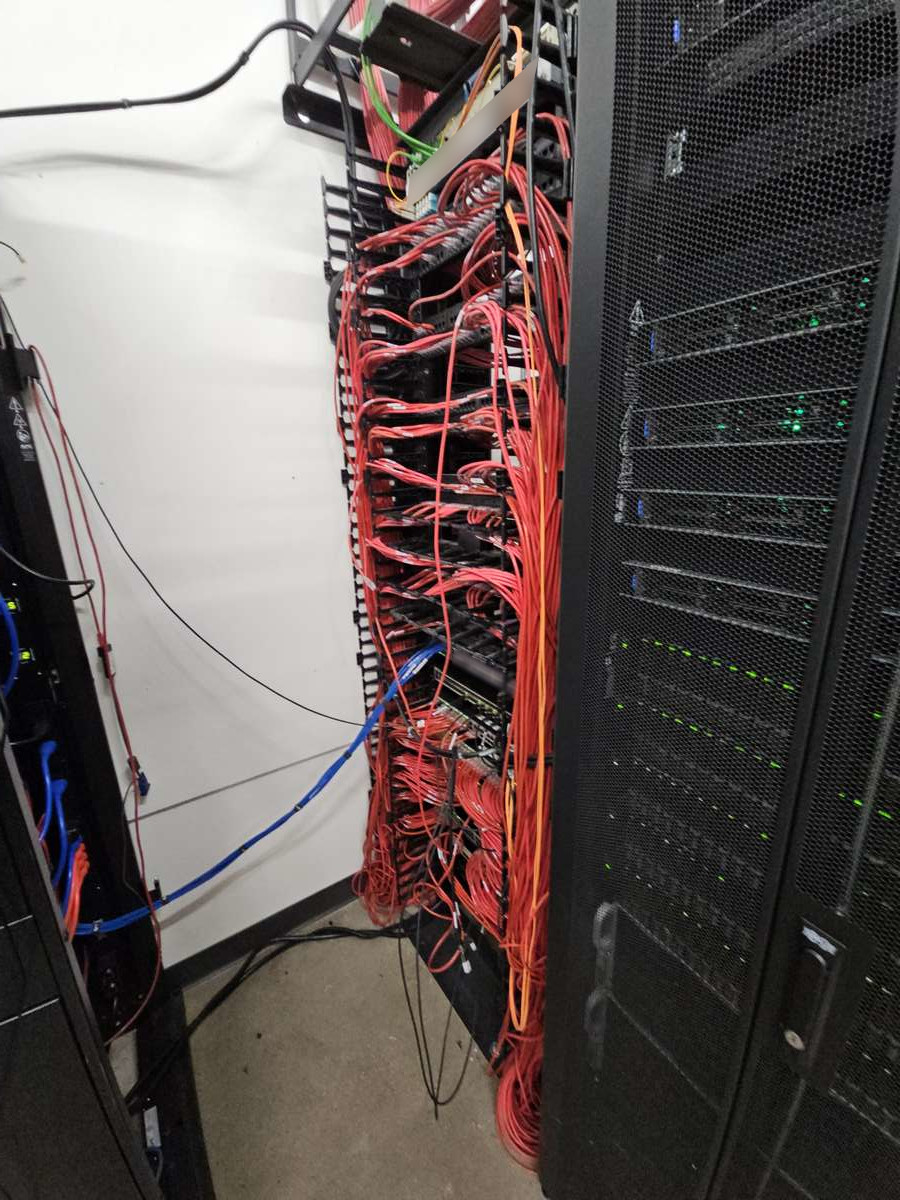
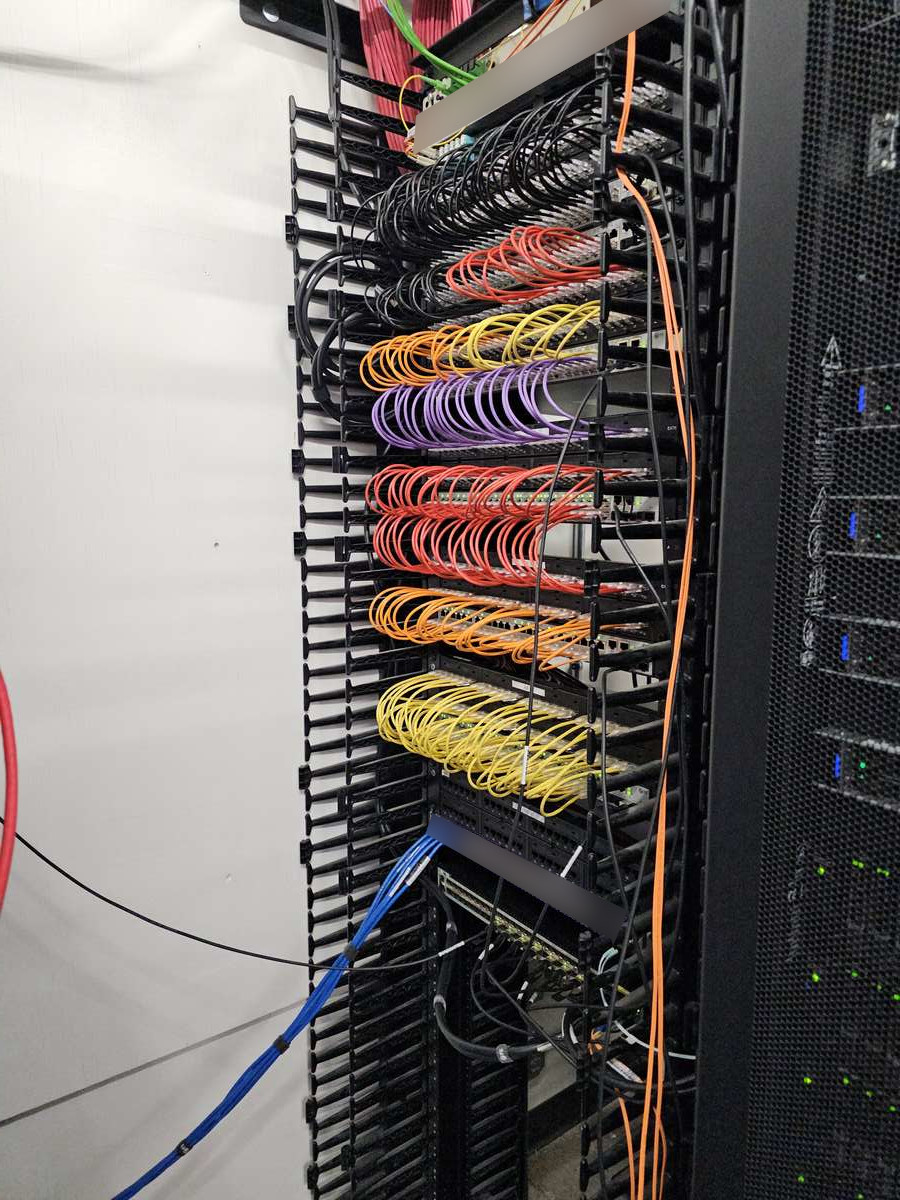
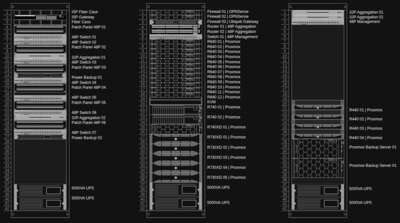

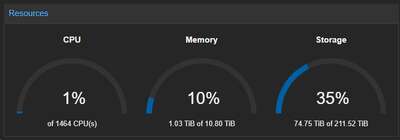

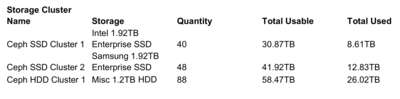








Designed and implemented 20-node hyper-converged ProxmoxVE cluster, concurrently hosting up to 3,000-4,000 virtual machines and containers: Specifications for this infrastructure:
|
|
▸ Networking and Security
| Solo Management and Operation | 2020 - Now |

Managed a variety of network configurations and their supporting software:
|
|
▸ Active Directory Management
| Solo Management and Operation | 2019 - Now |
Active Directory Management (500+ users)
|
|
Tools and Platforms
- Electronics and CAD: Altium Designer, KiCad, Autodesk Fusion 360, MATLAB
- Server and Virtualization: Proxmox VE, Ceph, VMWare vSphere, Windows Server, Hyper-V, Ansible, PDQ Deploy
- Programming Languages: C/C++, Python, JavaScript, C# (WPF, Unity), Bash, PowerShell, Make
- Environments and Administration: Linux and Windows administration, embedded platforms (ARM, RISC), GitHub Automation
- Miscellaneous: Blender, Adobe Suite (Photoshop, Illustrator, After Effects, Substance Painter), GIMP/Inkscape
Information on coela.dev
▸ Coela.dev Website
| Github | 2025 - Now |
The site’s backend uses Ruby and Jekyll to compile Markdown and Liquid templates into a static site on push. A GitHub CI workflow rebuilds and deploys the site on changes to the main branch. On the front end, an HTML5 Canvas script animates sine-wave effects, and CSS with JavaScript handles glitch-text animations for headings. |
|